

Artículos
Sistema de Detección y Alerta de Incendios Forestales Basado en Procesamiento de Imágenes e IA
Forest Fire Detection and Alert System Based on Image Processing and AI
 Erick Alexander Castillo Matamoros ericka.castillo@ucuenca.edu.ec
Robert Sebastián Chalco Montalván roberts.chalco@ucuenca.edu.ec
Santiago Renán González Martínez santiago.gonzalezm@ucuenca.edu.ec
Erick Alexander Castillo Matamoros ericka.castillo@ucuenca.edu.ec
Robert Sebastián Chalco Montalván roberts.chalco@ucuenca.edu.ec
Santiago Renán González Martínez santiago.gonzalezm@ucuenca.edu.ec
Revista Tecnológica ESPOL - RTE
Escuela Superior Politécnica del Litoral, Ecuador
ISSN: 0257-1749
ISSN-e: 1390-3659
Periodicidad: Semestral
vol. 37, núm. 1, Esp., 2025
Aprobación: 20 agosto 2025
Publicación: 15 octubre 2025

Resumen:
El objetivo del presente trabajo se enfoca en el diseño e implementación de un sistema inteligente de bajo costo para la detección temprana de incendios forestales, utilizando tecnologías de IoT (Internet of Things) e IA (Inteligencia Artificial). La metodología diseñada implicó el desarrollo y la evaluación comparativa de múltiples algoritmos, divididos en dos enfoques: técnicas basadas en el análisis de espacios de color (RGB, YCbCr, HSI, HSV y PJF) y modelos de IA (CNN, YOLOv8 y Haar Cascade). A partir de este análisis, se seleccionó una arquitectura híbrida que integra los dos métodos de mayor rendimiento: un detector de objetos basado en YOLOv8 (Método 9) y un algoritmo cromático que fusiona los espacios PJF, RGB y YCbCr (Método 12). Este sistema visual se complementa con un sensor de partículas PM2.5 para validar la presencia de humo y módulos GPS/4G para emitir alertas georreferenciadas. Como resultado clave, el prototipo final validado en condiciones controladas alcanzó métricas destacadas como un 99.82 % de exactitud, 99.64 % de sensibilidad y 100 % de especificidad bajo condiciones de alta iluminación. También demostró eficiencia energética y estabilidad térmica mediante monitoreo continuo de CPU, RAM y consumo de corriente. La principal contribución del trabajo consiste en una solución de campo validada, cuya arquitectura híbrida demuestra ser precisa, eficiente y adaptable, confirmando su viabilidad para ser implementada en contextos de emergencia.

Palabras clave: sistemas embebidos, detección de incendios, monitoreo automatizado.
Abstract: The objective of this work focuses on the design and implementation of a low-cost intelligent system for the early detection of forest fires, using IoT (Internet of Things) and AI (Artificial Intelligence) technologies. The designed methodology involved the development and comparative evaluation of multiple algorithms, divided into two approaches: techniques based on the analysis of color spaces (RGB, YCbCr, HSI, HSV, and PJF) and AI models (CNN, YOLOv8, and Haar Cascade). From this analysis, a hybrid architecture was selected that integrates the two highest-performing methods: an object detector based on YOLOv8 (Method 9) and a chromatic algorithm that fuses the PJF, RGB, and YCbCr spaces (Method 12). This visual system is complemented by a PM2.5 particle sensor to validate the presence of smoke and GPS/4G modules to issue georeferenced alerts. As a key result, the final prototype validated under controlled conditions achieved outstanding metrics such as 99.82% accuracy, 99.64% sensitivity, and 100.00% specificity under high illumination conditions. It also demonstrated energy efficiency and thermal stability through continuous monitoring of CPU, RAM, and current consumption. The main contribution of this work consists of a validated field solution, whose hybrid architecture proves to be accurate, efficient, and adaptable, confirming its feasibility for implementation in emergency contexts.
Keywords: embedded systems, fire detection, automated monitoring, pattern recognition.
Introducción
Los incendios forestales constituyen una amenaza creciente para la sostenibilidad ambiental, la seguridad humana y el desarrollo económico de numerosas regiones. Su recurrencia se ha intensificado debido al cambio climático, la deforestación y la expansión urbana descontrolada. A nivel global, las sequías prolongadas y las olas de calor, reconocidas por organismos como la OMM (Organización Meteorológica Mundial), han incrementado significativamente el riesgo de incendios (Organización Meteorológica Mundial, 2024). Ecuador no ha sido la excepción; según el INAMHI, en 2024 se atravesó la peor sequía en más de seis décadas, particularmente en la región Sierra, lo que ha derivado en la pérdida de miles de hectáreas de vegetación, afectación a la biodiversidad y daños a comunidades vulnerables (Secretaría Nacional de Gestión de Riesgos, 2024; Secretaría Nacional de Gestión de Riesgos, 2025).
La mayoría de estos eventos son provocados por actividades humanas, lo que subraya la urgencia de implementar soluciones tecnológicas para su prevención y detección oportuna. En muchas zonas rurales del país, la falta de sistemas automatizados de monitoreo agrava el impacto de estos desastres. Aunque se han impulsado medidas de capacitación y sensibilización ciudadana, estas deben complementarse con tecnologías emergentes como el IoT, la visión por computadora y la IA. Las soluciones basadas en sistemas inteligentes capaces de operar en tiempo real, validar condiciones ambientales, así como emitir alertas georreferenciadas, pueden transformar la gestión de riesgos, ofreciendo una respuesta más rápida y precisa ante focos incipientes de incendio.
En este contexto, se propone una arquitectura híbrida que integra algoritmos de visión por computadora y de IA para un análisis visual robusto. Esta detección se complementa con
sensores ambientales para validar la presencia de humo y con módulos de comunicación para la emisión de alertas georreferenciadas en tiempo real, todo implementado sobre hardware de bajo consumo energético.
El resto del artículo se encuentra organizado de la siguiente forma. En la sección de Trabajos Relacionados, se revisan los enfoques más relevantes para la detección de incendios basados en procesamiento de imágenes, IoT e IA. Posteriormente, en la sección Materiales y Métodos, se detalla la metodología seguida para el desarrollo del sistema, incluyendo la implementación de los algoritmos y la integración de sensores. A continuación, en la sección Resultados y Discusión, se presentan las métricas de evaluación obtenidas, tanto a nivel de precisión como del rendimiento operativo del sistema. Finalmente, se exponen las principales conclusiones del estudio.
Trabajos Relacionados
La creciente frecuencia de desastres ambientales ha impulsado la integración de tecnologías emergentes para desarrollar sistemas de monitoreo más eficientes. Por un lado, el IoT ha transformado la interacción entre dispositivos y entornos, habilitando el monitoreo continuo y la comunicación autónoma que son esenciales en aplicaciones ambientales (Xing et al., 2024). Por otro lado, la IA, especialmente las CNN (Redes Neuronales Convolucionales), ha revolucionado el procesamiento de imágenes al permitir la extracción automática de características y la identificación de patrones en tiempo real (Koschan y Abidi, 2008). La sinergia de estas tecnologías es hoy un pilar en las ciencias ambientales; investigaciones recientes demuestran un crecimiento exponencial de publicaciones en áreas como la monitorización de la calidad del aire y agua, y la gestión de desastres (Alotaibi y Nassif, 2024). Esta convergencia ha facilitado sistemas integrados que utilizan redes de sensores, drones y satélites para aplicar aprendizaje profundo en la detección activa de fuego (Yang et al., 2024;Dilshad et al., 2024).
Impulsados por el aumento en el poder computacional y la democratización de plataformas de bajo costo como Raspberry Pi, los avances en aprendizaje profundo han mejorado significativamente la detección de incendios. Se han integrado modelos como YOLO para la detección en tiempo real, U-Net para la segmentación precisa y redes híbridas (CNN-LSTM) para el análisis temporal, logrando reducir falsos positivos en entornos complejos (Vasconcelos et al., 2024). Estos desarrollos permiten una identificación temprana de incendios, contribuyendo a mitigar sus impactos ecológicos y humanos. A pesar del progreso en la precisión de los modelos predictivos y la analítica en tiempo real, persisten desafíos importantes como la calidad de los datos, la interoperabilidad de los sistemas y diversas consideraciones éticas (Miller et al., 2025).
Un primer conjunto de soluciones para la detección de incendios se basa en el análisis de imágenes utilizando espacios de color básicos. En concreto, en el espacio de color RGB se implementan reglas heurísticas como identificar regiones con tonalidades características del fuego. Una de estas reglas se basa en la relación entre los canales de color, expresada como:

Estas reglas se utilizan para identificar regiones con tonalidades características del fuego, como rojos y naranjas intensos (Buza y Akagic, 2022). A continuación, dichas reglas se complementan con umbrales de intensidad para filtrar falsas detecciones causadas por objetos brillantes o reflejos. Sin embargo, la sensibilidad a las variaciones de iluminación natural, como la luz solar o las sombras, limita la eficacia de estas propuestas, generando tasas elevadas de
falsos positivos en entornos no controlados (Celik et al., 2007). Para abordar estas deficiencias, existen soluciones que exploran espacios de color alternativos como YCbCr, que separa la luminancia (Y) de la crominancia (Cb, Cr). En este enfoque, se definen condiciones como la siguiente:
Y se incorpora lógica difusa para evaluar la probabilidad de presencia de fuego, mejorando la adaptabilidad a condiciones ambientales cambiantes (Celik et al., 2007). Adicionalmente, en (Wu et al., 2024) se propone combinar el espacio de color RGB con el espacio HSI (Tono, Saturación, Intensidad), utilizando parámetros como la saturación y la tasa de crecimiento de las llamas donde la tasa de crecimiento (α) se define como:
Este método reduce significativamente los errores al analizar el comportamiento temporal de las llamas. Un hito en este ámbito fue el desarrollo del espacio de color PJF, específicamente diseñado para optimizar la detección de fuego. Este espacio mejora la representación cromática de las llamas, alcanzando una precisión del 99.8 % en entornos controlados, aunque su rendimiento disminuye en escenarios reales con interferencias (Hamida et al., 2022). En tal contexto, en la literatura se propone integrar técnicas de procesamiento de imágenes como la umbralización adaptativa para segmentar regiones de interés, el filtrado mediano para eliminar ruido, las operaciones morfológicas para refinar contornos y la segmentación por regiones para analizar áreas complejas. Adicionalmente, se destaca el uso del coeficiente de correlación de Pearson para validar la presencia de fuego mediante el análisis de cambios entre fotogramas consecutivos, aumentando la confiabilidad en entornos dinámicos (Anh et al., 2022). A pesar de estos avances, los métodos tradicionales siguen enfrentando desafíos en condiciones de iluminación variable y confusión con objetos de colores similares, como luces artificiales o reflejos solares.
Por otra parte, la llegada de la IA marcó un cambio radical en la detección de incendios forestales, al introducir modelos capaces de aprender y adaptarse a patrones complejos sin depender de reglas predefinidas. Una aplicación destacada de estas técnicas es el análisis de imágenes satelitales, donde se utilizan datos de instrumentos como Sentinel-1, Sentinel-2 y MODIS para la segmentación de áreas quemadas a gran escala (Rashkovetsky et al., 2021). Si bien estos sistemas son potentes, enfrentan limitaciones como la cobertura de nubes, lo que ha llevado a proponer la fusión de datos de sensores ópticos y de radar para garantizar la detección. En sistemas terrestres, las CNN destacan por su capacidad para extraer automáticamente características jerárquicas de las imágenes, como bordes, texturas y formas, eliminando la necesidad de diseñar manualmente descriptores visuales. En el estudio Altowaijri et al. (2021), propone integrar CNN con sistemas IoT para monitoreo en tiempo real, utilizando descriptores binarios robustos que optimizan el procesamiento en dispositivos de bajo costo y conservan la privacidad al evitar el almacenamiento de imágenes crudas. Modelos preentrenados como ResNet50, ajustados mediante transfer learning, han demostrado precisiones superiores al 99.0
% en la identificación de fuego, incluso en datasets con alta diversidad (Moreno Rubio, 2021).
El algoritmo YOLO, conocido por su eficiencia en detección en tiempo real, ha sido
ampliamente adoptado en este campo. En un caso práctico, se implementó en una Raspberry Pi
con cámaras tipo ojo de pez, logrando un procesamiento rápido y preciso en entornos forestales, ideal para despliegues de bajo costo (Lee et al., 2023). La versión de YOLOv8 ha demostrado una alta efectividad, alcanzando precisiones del 97.1 % para la detección de fuego en entornos de ciudades inteligentes (Talaat y ZainEldin, 2023) y precisiones de clasificación del 92.6
% en sistemas montados en UAVs (Bhargav y Singh, 2025). En otra propuesta se plantea combinar YOLO con sensores IoT, como el MQ-2 para detectar humo, integrando datos visuales y químicos para aumentar la robustez de las detecciones (Avazov et al., 2023). Por su parte, el clasificador en cascada de Haar, basado en características Haar-like, ha ofrecido resultados prometedores en aplicaciones específicas. En el estudio (Pranamurti et al., 2019), se combinó con IoT para generar alertas en tiempo real, mientras que otra implementación (Shrestha, 2020), optimizada con AdaBoost, alcanzó una precisión del 92 %, aunque mostró limitaciones en detecciones a larga distancia debido a la pérdida de resolución. Estos enfoques avanzados han elevado los estándares de precisión y velocidad en la detección de incendios. Sin embargo, persisten retos como la optimización del consumo energético en dispositivos IoT, la cobertura en áreas remotas sin infraestructura de red y la integración efectiva de múltiples fuentes de datos (visuales, térmicas y químicas) para minimizar falsos negativos. La combinación de IA e IoT está sentando las bases para sistemas más resilientes y adaptables.
Materiales y Métodos
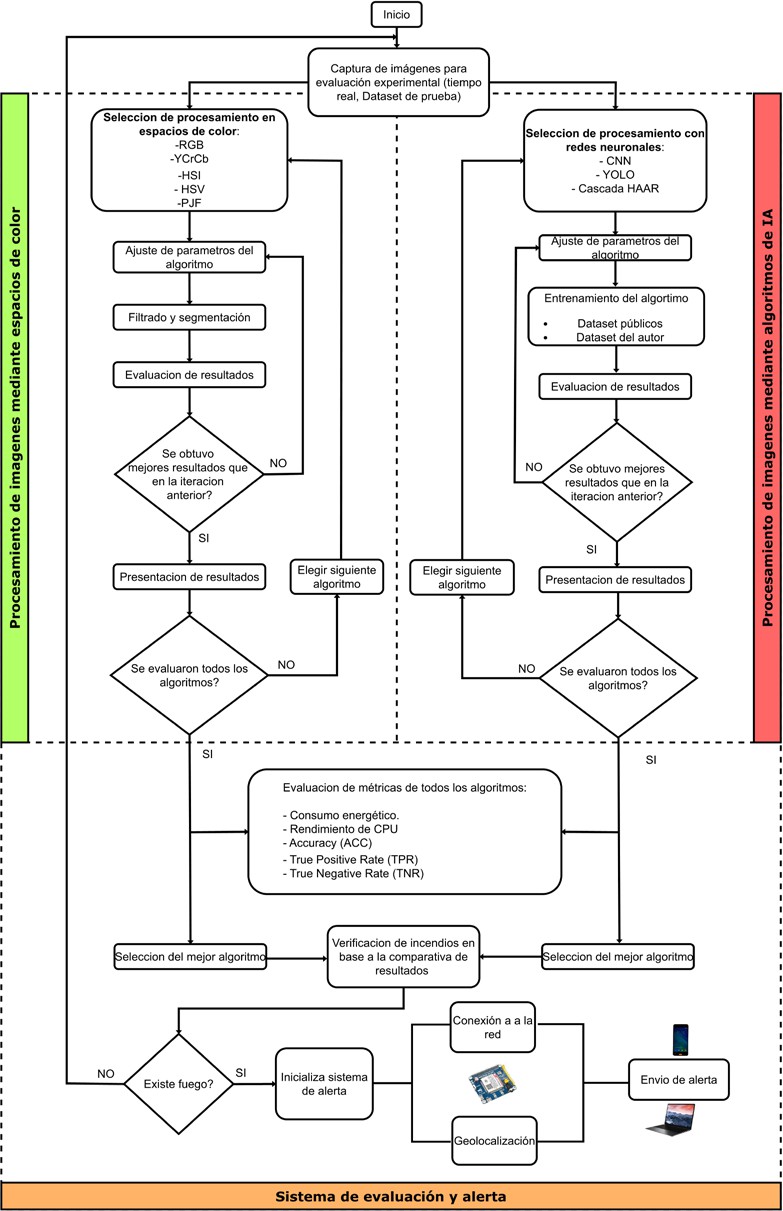
La Figura 1 presenta el diagrama metodológico diseñado para el desarrollo del sistema, el cual se estructura en tres etapas. La primera etapa corresponde al procesamiento de imágenes mediante algoritmos basados en espacios de color, incluyendo el diseño, implementación y evaluación comparativa de distintos métodos de segmentación cromática aplicados a la detección de fuego. La segunda etapa abarca el procesamiento de imágenes mediante algoritmos basados en IA, en particular las CNN optimizadas para tareas de clasificación y detección de objetos, cuya efectividad también fue evaluada a través de métricas específicas. Finalmente, la tercera etapa corresponde al análisis integral de las métricas obtenidas por los algoritmos desarrollados y la integración de un sistema automatizado de generación de alertas, el cual valida la presencia de un incendio mediante parámetros visuales y ambientales antes de emitir notificaciones georreferenciadas.
Procesamiento de imágenes mediante espacios de color
En la primera etapa de la metodología se desarrollaron algoritmos de procesamiento de imágenes basados en espacios de color, específicamente los métodos del 1 al 7. Estos algoritmos fueron diseñados tomando como base referencias del estado del arte en detección de fuego, empleando modelos cromáticos como RGB (Red, Green, Blue), YCbCr (Luma, Blue-difference Chrominance, Red-difference Chrominance), HSV (Hue, Saturation, Value) y PJF (Brightness, Red-Green, Yellow-Blue). No obstante, cada uno de ellos fue objeto de ajustes estructurales y parametrización experimental, con el fin de adaptarlos a las condiciones particulares del entorno de despliegue y optimizar su rendimiento frente a variaciones de iluminación y presencia de elementos visualmente similares al fuego. La Tabla 1 resume las principales características de estos algoritmos. Como resultado de una evaluación comparativa de estos métodos en escenarios controlados, se identificó que el Método 7, basado en el espacio de color PJF, ofrecía una de las mejores tasas de detección en términos de sensibilidad y especificidad. A partir de este hallazgo, y con el objetivo de mejorar aún más el rendimiento de los enfoques cromáticos, se desarrollaron los métodos 11 al 14, los cuales integran operaciones adicionales como validación por canales RGB, segmentación lógica en YCbCr y HSI, así como técnicas de fusión de máscaras y filtrado morfológico. Estas versiones fueron construidas como combinaciones estructuradas que amplían las capacidades del Método 7, priorizando la detección robusta y la reducción de falsos positivos en condiciones ambientales diversas.
Procesamiento de imágenes mediante algoritmos de IA
En esta etapa se abordó el desarrollo de algoritmos de detección basados en IA, correspondientes a los métodos 8, 9 y 10. Esta fase incluyó el diseño y entrenamiento de modelos
como CNN, el algoritmo de detección en tiempo real YOLO y el clasificador en cascada de Haar. Con el propósito de asegurar una generalización adecuada y evitar problemas de sobreajuste, cada modelo fue sometido a un proceso de calibración mediante pruebas preliminares, evaluando el equilibrio entre sensibilidad y especificidad en distintos niveles de entrenamiento. Para ello se utilizaron bases de datos públicas como RoboFlow (Roboflow, 2020) y Kaggle (Kaggle, s/f), las cuales fueron complementadas con un conjunto de imágenes generado mediante la simulación controlada de un entorno real de incendio. Esta estrategia permitió incluir condiciones visuales locales, mejorar la representación de variabilidad en los datos y ajustar los modelos a los desafíos propios del entorno de despliegue. La Tabla 1 detalla las especificaciones técnicas de estos métodos, su estructura operativa y el tipo de entrada que utilizan, permitiendo visualizar su complementariedad frente a los algoritmos cromáticos desarrollados en la primera etapa.
| MÉTODO 1 | |
| Espacio de Color | RGB |
| Preprocesamiento | Extracción de canales R, G, B; cálculo de Rmedia |
| Filtrado | Cinco condiciones lógicas sobre R, G, B |
| Segmentación | Binarización, detección de contornos, filtrado por área mínima, agrupación de regiones |
| MÉTODO 2 | |
| Espacio de Color | RGB |
| Preprocesamiento | Supresión de valores < media geométrica de cada canal |
| Filtrado | Ajuste de canal rojo; umbralización global Otsu para máscara γ; umbrales adaptativos locales en 6 franjas |
| Segmentación | Refinado de máscara (morfología, eliminación de ruido); intersección de máscaras horizontales y verticales |
| MÉTODO 3 | |
| Espacio de Color | YCbCr |
| Preprocesamiento | Conversión a YCbCr; máscara heurística preliminar |
| Filtrado | Cálculo de diferencia entre canales; sistema de inferencia difusa |
| Segmentación | Mapa de probabilidad; umbralización difusa; contornos y agrupación |
| MÉTODO 4 | |
| Espacio de Color | Paralelo en RGB y YCbCr |
| Preprocesamiento | Conversión a ambos espacios; cálculo de medias |
| Filtrado | RGB: umbrales fijos; YCbCr: condiciones lógicas vs. medias |
| Segmentación | Intersección de máscaras; morfología; contornos |
| MÉTODO 5 | |
| Espacio de Color | Paralelo en RGB y HSI |
| Preprocesamiento | Extracción de canales H, S, I; cálculo de saturación media |
| Filtrado | Condiciones lógicas mixtas “RGB–HSI”; dilatación morfológica |
| Segmentación | Detección de contornos y filtrado por área mínima |
| MÉTODO 6 | |
| Espacio de Color | HSV |
| Preprocesamiento | Conversión a HSV; normalización de rangos |
| Filtrado | Generación de dos máscaras via inRange para H, S, V |
| Segmentación | Unión (OR) de máscaras; contornos; agrupación de área mínima |
| MÉTODO 7 | |
| Espacio de Color | PJF |
| Preprocesamiento | Cálculo de componentes P, J, F |
| Filtrado | Máscaras fijas elementales: P > 220, J > 60, F > 230 |
| Segmentación | Combinación lógica (P*J + F*J); detección de contornos y agrupación de áreas mínimas. |
| MÉTODO 8 | |
| Tipo de modelo | Clasificador binario |
| Algoritmo de IA | CNN |
| Procedimiento | 1. Recolectar imágenes y etiquetarlas como “fuego” o “no fuego”. 2. Separar los datos en conjuntos de entrenamiento, validación y prueba. 3. Aplicar transformaciones (rotaciones, recortes) para aumentar la variedad. 4. Definir la arquitectura de la red y sus capas. 5. Entrenar el modelo ajustando pesos en cada pasada. |
| Datasets | Imágenes usadas para el entrenamiento: 1828 con fuego y 3015 sin fuego. |
| Épocas entrenadas | 28 |
| MÉTODO 9 | |
| Tipo de modelo | Detector de objetos |
| Algoritmo de IA | YOLOv8 |
| Procedimiento | 1. Reunir imágenes con y sin fuego, etiquetando posición en las positivas 2. Organizar carpetas según formato YOLO (imágenes y etiquetas). 3. Generar el archivo de configuración data.yaml. 4. Dividir el conjunto en entrenamiento, validación y prueba. 5. Ejecutar el entrenamiento con YOLOv8. |
| Datasets | Imágenes usadas para el entrenamiento: 1828 con fuego y 914 sin fuego. |
| Épocas entrenadas | 25 |
| MÉTODO 10 | |
| Tipo de modelo | Detector de objetos |
| Algoritmo de IA | Clasificador en cascada Haar |
| Procedimiento | 1. Generar listados de imágenes con y sin fuego en archivos de texto. 2. Crear el archivo de muestras posi.vec con la herramienta de OpenCV. 3. Entrenar el clasificador en varias etapas con OpenCV. 4. Dividir el conjunto en entrenamiento, validación y prueba. Ajustar parámetros de etapas, tamaño de ventana y memoria asignada. 5. Ejecutar el entrenamiento del modelo |
| Datasets | Imágenes usadas para el entrenamiento: 1006 con fuego y 3015 sin fuego. |
| Épocas entrenadas | 17 |
| MÉTODO 11 | |
| Espacio de Color | PJF + RGB |
| Preprocesamiento | Conversión al espacio PJF y extracción de canales R, G, B |
| Filtrado | Aplicación de condiciones lógicas combinadas sobre canales RGB y máscaras del Método 7 |
| Segmentación | Máscaras refinadas por contorno y área mínima, combinadas lógicamente |
| MÉTODO 12 | |
| Espacio de Color | PJF + RGB + YCbCr |
| Preprocesamiento | Conversión simultánea a ambos espacios de color |
| Filtrado | Umbrales específicos para canales RGB; condiciones lógicas sobre YCbCr (Método 4) |
| Segmentación | Fusión de máscaras de ambos espacios; morfología para refinar |
| MÉTODO 13 | |
| Espacio de Color | PJF + HSV |
| Preprocesamiento | Conversión a HSV y cálculo de componentes del modelo PJF |
| Filtrado | Aplicación de condiciones sobre saturación y máscaras HSV |
| Segmentación | Combinación lógica con máscara PJF; refinamiento por contornos y área |
| MÉTODO 14 | |
| Espacio de Color | PJF + RGB + HSI |
| Preprocesamiento | Extracción de canales R, G, B, y cálculo de H, S, I (Método 5) |
| Filtrado | Condiciones sobre saturación y factor de ajuste K; combinación con máscaras RGB |
| Segmentación | Operaciones morfológicas (dilatación) y fusión final de máscaras |
Sistema de evaluación y alerta
Para evaluar el desempeño general del sistema desarrollado, se definieron dos categorías de métricas: las métricas de evaluación del modelo y las métricas de rendimiento del sistema. En el primer grupo se consideraron indicadores clásicos como la exactitud (ACC, Accuracy),
la tasa de verdaderos positivos (TPR, True Positive Rate) y la tasa de verdaderos negativos (TNR, True Negative Rate). Estas métricas permiten cuantificar la capacidad del sistema para detectar correctamente tanto la presencia como la ausencia de eventos de incendio, y fueron calculadas a partir de pruebas controladas bajo diferentes condiciones ambientales. En cuanto al rendimiento operativo, se monitorearon parámetros como la corriente de operación en miliamperios, el porcentaje de uso del CPU, el consumo de memoria RAM y la temperatura del procesador durante el funcionamiento continuo. Para esta última categoría se utilizó un módulo INA219 (Texas Instruments, 2008), encargado de realizar mediciones en tiempo real del consumo eléctrico del sistema. Este componente, integrado físicamente dentro del encapsulado electrónico, se visualiza en el esquema de la Figura 4 y fue fundamental para asegurar la eficiencia energética del sistema en condiciones reales de despliegue.
El sistema final implementado integra una lógica híbrida de verificación que combina el Método 9, basado en IA, y el Método 12, basado en segmentación cromática. El flujo de decisión inicia con el análisis visual mediante ambos métodos; si el Método 9 detecta fuego con un nivel de confianza superior a 0.25, se activa directamente la siguiente fase de validación.
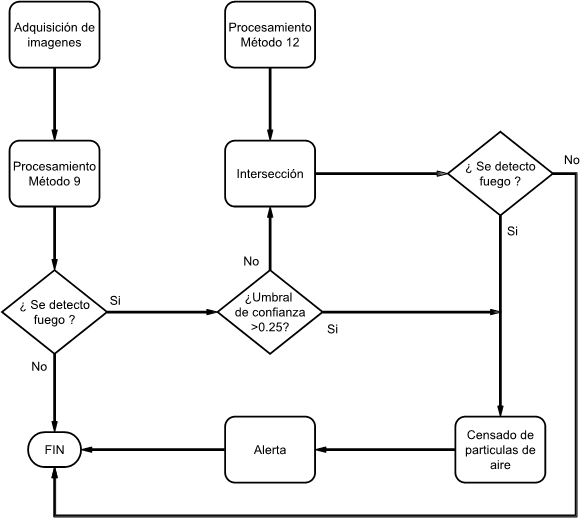
En caso contrario, se evalúa si el Método 12 también identifica fuego y si existe una coincidencia espacial significativa entre ambas segmentaciones. Solo si se cumple esta condición se considera la detección como válida. Una vez superada esta verificación visual, el sistema ejecuta una etapa adicional mediante el sensor PMS5003 (Zhou y Zheng, 2016), encargado de medir la concentración de partículas PM2.5 en el aire. Si dicha concentración supera el
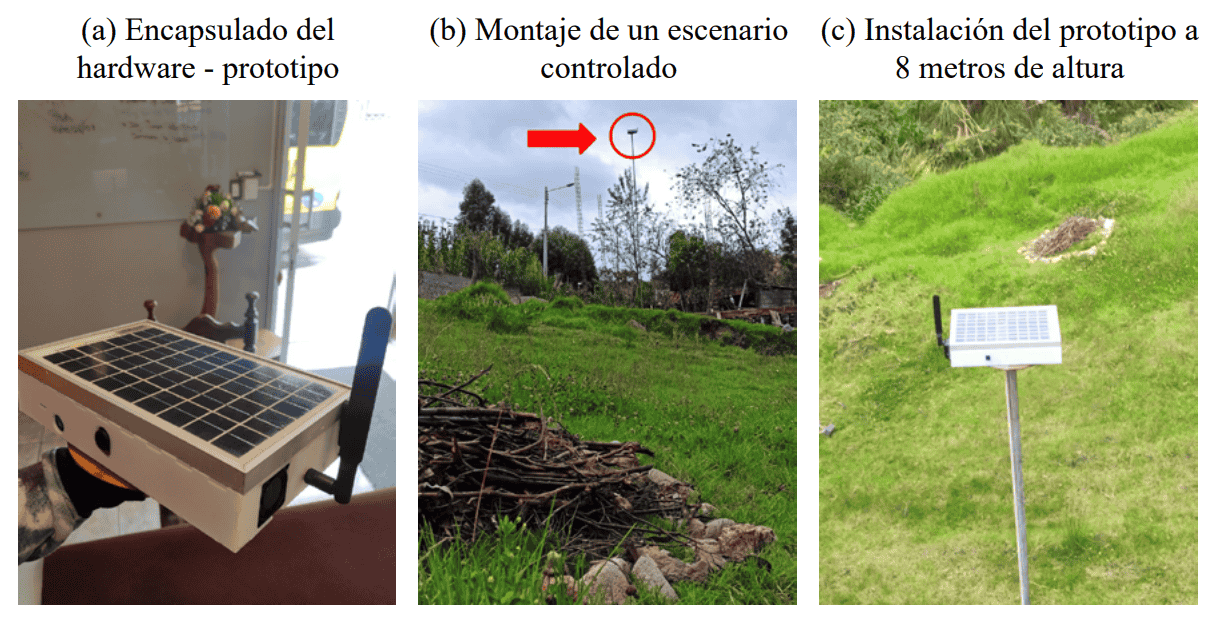
umbral de 100 μg/m³ definido experimentalmente, el sistema confirma la presencia del siniestro y se procede con la activación del sistema de alerta. La lógica detallada de esta arquitectura se representa en la Figura 2, donde se esquematiza el flujo completo desde la adquisición de imágenes hasta la validación ambiental. Para corroborar la funcionalidad del sistema en un entorno representativo, se realizó una implementación de campo simulando condiciones reales de incendio. La Figura 3 muestra el montaje final del prototipo, evidenciando la disposición de los sensores, la orientación de la cámara y la operación autónoma en condiciones naturales.
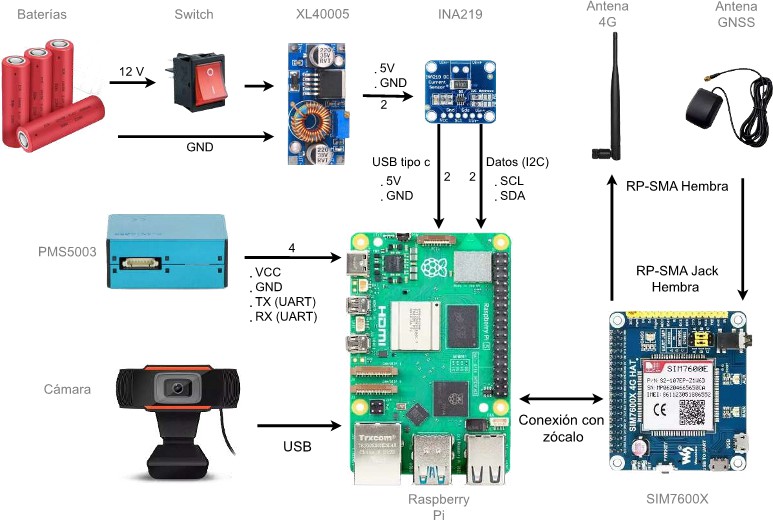
El sistema de alerta fue diseñado para emitir notificaciones automáticas en tiempo real una vez confirmada la presencia de un incendio. Estas notificaciones incluyen una imagen del evento detectado, las coordenadas geográficas obtenidas mediante el módulo GPS y un enlace a Google Maps para facilitar la localización remota del siniestro. El mensaje es enviado a través de la red celular 4G mediante el módulo SIM7600X (Waveshare, 2021) hacia un grupo de Telegram configurado como canal de alerta. Esta funcionalidad garantiza una respuesta rápida por parte de las autoridades o personal designado, incluso en zonas sin infraestructura de red fija. Todos los componentes, incluyendo la Raspberry Pi 4B, la cámara digital, el sensor PMS5003, el módulo GPS, el módulo SIM7600X y el INA219, están organizados dentro de un encapsulado compacto y resistente, diseñado para soportar condiciones ambientales adversas. La disposición física y lógica de estos elementos se detalla en el esquema eléctrico y de conexión presentado en la Figura 4.
Resultados y Discusión
La presente sección expone los resultados obtenidos tras la evaluación del sistema propuesto, abordando tanto el desempeño de los algoritmos de detección como las condiciones operativas del sistema en un entorno de prueba. Para una mejor organización, los resultados se presentan en tres bloques principales: primero, se analizan las métricas de evaluación de los algoritmos desarrollados en dos escenarios controlados; posteriormente, se detallan las métricas de rendimiento del sistema desde el punto de vista energético y computacional; y finalmente, se describe el comportamiento operativo del sistema final durante su despliegue en un entorno simulado.
Métricas de evaluación del modelo
Con base en el flujo metodológico descrito en la Figura 1, esta sección presenta los resultados obtenidos tras la aplicación de los algoritmos desarrollados a distintos escenarios de prueba. En el escenario 1 se evalúan los métodos del 1 al 14, considerando tanto algoritmos basados en espacios de color como técnicas de IA. Esta evaluación se realiza sobre un conjunto mixto compuesto por imágenes de bases públicas y registros obtenidos en simulaciones controladas. Por otro lado, el escenario 2 corresponde a pruebas realizadas exclusivamente en un entorno real, en el cual se evalúa el desempeño del sistema final implementado, ya integrado con su lógica híbrida de decisión y validación ambiental.
Escenario 1
Al analizar este primer escenario, los resultados presentados en la Tabla 2 revelan un claro contraste en el rendimiento de los algoritmos. Entre los enfoques basados en espacios de color, el Método 12 se posiciona como el más robusto, alcanzando una exactitud del 99.37 %. Por su parte, el Método 9, basado en YOLOv8, lidera entre las técnicas de IA con un 99.21 % de exactitud.
El éxito del Método 12 radica en su arquitectura de fusión multiespacio, que hereda y combina las estrategias más efectivas de otros métodos. Su base es el Método 7, utilizando el espacio de color PJF que está específicamente diseñado para resaltar las características de luminancia (P) y cromaticidad (J, F) del fuego; sobre este, aplica una segmentación inicial mediante umbrales fijos y una combinación lógica de máscaras. A esta detección primaria, el Método 12 le superpone la lógica del Método 4, realizando un filtrado dual: primero, en el espacio RGB, aplica umbrales cromáticos fijos para validar el perfil de color de un incendio; y segundo, en el espacio YCbCr, utiliza condiciones lógicas que comparan los valores de los canales contra sus promedios para añadir robustez frente a variaciones de iluminación. Es la
fusión final mediante la intersección de estas máscaras lo que le otorga su alta precisión; un píxel solo se clasifica como fuego si cumple simultáneamente los criterios en los tres dominios analíticos, reduciendo drásticamente los falsos positivos.
| MÉTODO | ACCURACY(ACC) | TRUE POSITIVE RATE (TPR) | TRUE NEGATIVE RATE (TNR) | |
| Espacios de color | 1 | 96.20 % | 97.50 % | 94.87 % |
| 2 | 90.66 % | 85.00 % | 96.47 % | |
| 3 | 72.63 % | 49.69 % | 96.15 % | |
| 4 | 95.25 % | 97.81 % | 92.63 % | |
| 5 | 86.87 % | 79.06 % | 94.87 % | |
| 6 | 92.09 % | 88.75 % | 95.51 % | |
| 7 | 97.31 % | 99.69 % | 94.87 % | |
| IA | 8 | 98.58 % | 98.44 % | 98.72 % |
| 9 | 99.21 % | 99.69 % | 98.72 % | |
| 10 | 72.94 % | 63.12 % | 83.01 % | |
| Espacios de color | 11 | 96.99 % | 94.38 % | 99.68 % |
| 12 | 99.37 % | 99.38 % | 99.36 % | |
| 13 | 83.70 % | 68.44 % | 99.36 % | |
| 14 | 94.15 % | 88.75 % | 99.68 % |
En contraste, el Método 9 (YOLOv8) destaca por una razón diferente: su capacidad de aprender características jerárquicas y contextuales directamente de los datos. A diferencia de los métodos basados en reglas fijas (ej. R>G>B), YOLOv8 no solo identifica el color, sino también patrones más abstractos como la textura, la forma y la distribución espacial que caracterizan una llama, lo que le confiere una capacidad de generalización superior. Por otro lado, métodos con menor rendimiento como el Método 3 (Lógica Difusa) y el Método 10 (Haar Cascade) mostraron dificultades. El primero, a pesar de su sofisticación, depende de funciones de membresía predefinidas que pueden no ajustarse a la variabilidad del entorno simulado, mientras que el segundo utiliza características rectangulares simples, poco adecuadas para detectar fenómenos amorfos y de textura variable como el fuego.
Estos resultados adquieren especial relevancia dado que el conjunto de validación
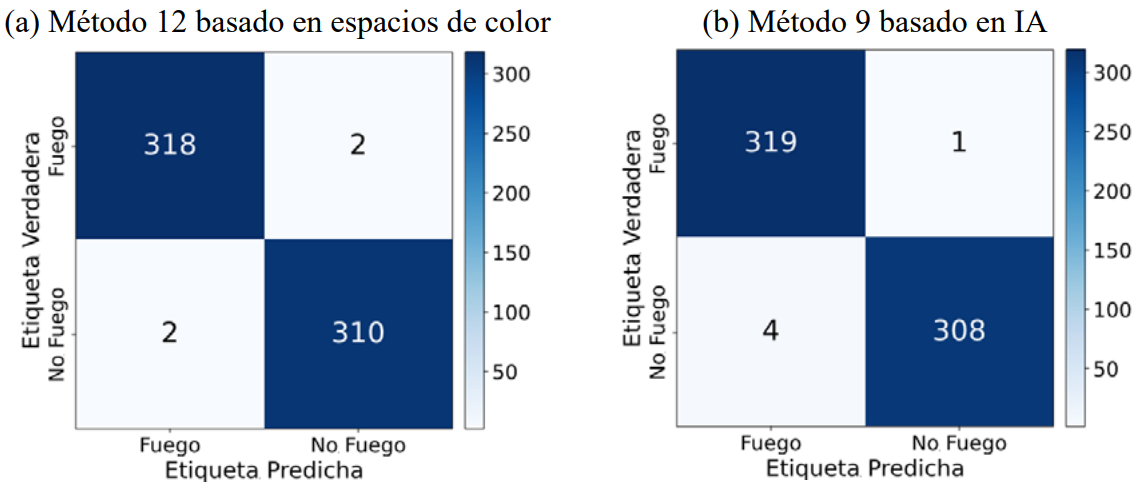
incorpora imágenes capturadas en un entorno realista simulado, confirmando la robustez y capacidad de generalización de los algoritmos líderes. Para complementar este análisis, la Figura 5 presenta las matrices de confusión del Método 12 y el Método 9. Ambas reflejan un alto grado de precisión; el Método 12 clasificó correctamente 318 imágenes con fuego y 310 sin fuego (4 errores), mientras que el Método 9 detectó 319 con fuego y 308 sin fuego (5 errores). La baja cantidad de fallos en ambos enfoques confirma su fiabilidad y justifica plenamente su selección para ser integrados en la arquitectura del sistema final.
Escenario 2
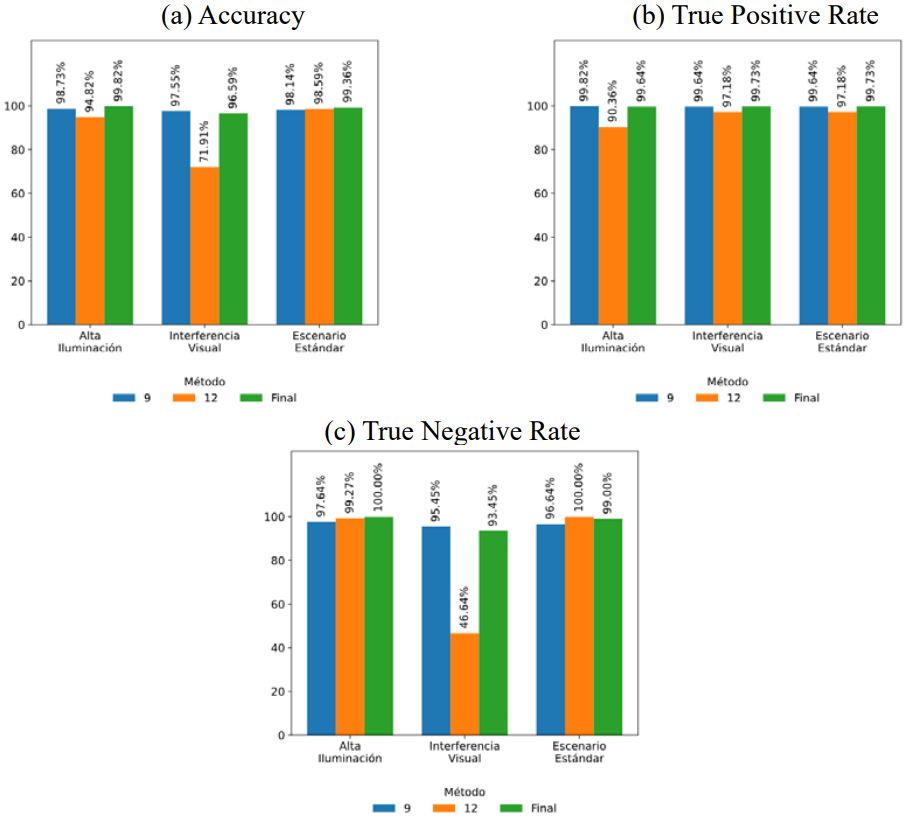
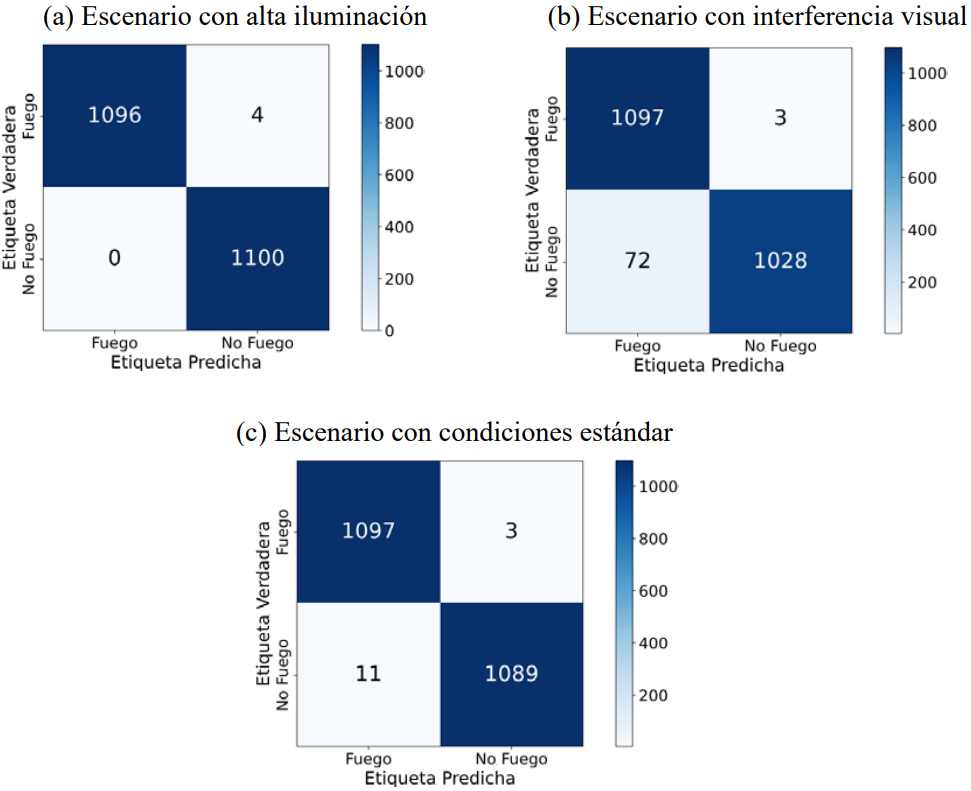
Los resultados obtenidos durante la validación de este escenario se presentan en la Tabla 3 y se ilustran comparativamente en la Figura 6, permitiendo evaluar el desempeño del Método 9 basado en IA, el Método 12 basado en espacios de color y la solución integrada (sistema final) frente a las variaciones de este escenario, como se presenta en la Figura 7. En dicha figura se visualizan las tres condiciones representativas consideradas: (a) alta iluminación donde predomina la incidencia solar directa, característico de una época de estiaje en la zona de interés; (b) interferencia visual, caracterizada por elementos de colores similares al fuego, como objetos o ropa de color rojo; y (c) escenario estándar, que representa condiciones normales de un día en la ciudad de Cuenca. Estas variaciones permiten analizar el comportamiento del sistema frente a escenarios reales con distintos niveles de complejidad visual. Cabe destacar que para esta validación se utilizaron un total de 6600 imágenes, distribuidas equitativamente en cada condición con 1100 imágenes con fuego y 1100 sin fuego por variación.
| MÉTODO | ACCURACY(ACC) | TRUE POSITIVE RATE (TPR) | TRUE NEGATIVE RATE (TNR) | |
| Alta iluminación | 9 | 98.73 % | 99.82 % | 97.64 % |
| 12 | 94.82 % | 90.36 % | 99.27 % | |
| Sistema Final | 99.82 % | 99.64 % | 100.00 % | |
| Interferencia visual | 9 | 97.55 % | 99.64 % | 95.45 % |
| 12 | 71.91 % | 97.18 % | 46.64 % | |
| Sistema Final | 96.59 % | 99.73 % | 99.45 % | |
| Condiciones estándar | 9 | 98.14 % | 99.64 % | 96.64 % |
| 12 | 98.59 % | 97.18 % | 100.00 % | |
| Sistema Final | 99.36 % | 99.73 % | 99.00 % |

El sistema final híbrido demostró una notable robustez y un rendimiento superior al de sus componentes individuales en las tres condiciones evaluadas, tal como se resume en la Tabla 3. En el escenario de alta iluminación, crítico para contextos de sequía, el sistema alcanzó un desempeño casi perfecto, con una exactitud del 99.82 % y una especificidad del 100 %. La matriz de confusión (Figura 8a) confirma esta fiabilidad, al no registrar un solo falso positivo y únicamente 4 falsos negativos entre 2200 imágenes, validando su eficacia ante la alta radiación solar.
Para el desafío de interferencia visual, la arquitectura híbrida demostró su principal ventaja: la mitigación de falsos positivos. Mientras que el Método 12 basado en color falló (especificidad del 46.64 %), el sistema final lo compensó eficazmente, alcanzando una especificidad del 93.45 %. La Figura 8b evidencia esta corrección, mostrando cómo el sistema redujo drásticamente los errores para identificar correctamente 1028 imágenes sin fuego, lo que valida la complementariedad de los enfoques.
Finalmente, en condiciones estándar, el sistema mantuvo una operación estable y precisa con una exactitud del 99.36 %. En este caso, priorizó una alta sensibilidad del 99.73 % para garantizar la detección de casi todos los eventos reales (1097 de 1100, ver Figura 8c), a cambio de un número mínimo y aceptable de falsas alarmas (11). Esta compensación es estratégicamente deseable en aplicaciones de seguridad, donde es preferible una alerta de más a omitir un evento real.
Es relevante contextualizar el sistema propuesto frente a los enfoques basados en satélites, que, si bien son fundamentales para el monitoreo de incendios a gran escala, presentan limitaciones para la detección temprana debido a la latencia en sus revisitas y a la obstrucción por nubes o humo. En este contexto, el sistema terrestre desarrollado no busca reemplazar a los satélites, sino actuar como una solución complementaria de alta resolución para la detección inmediata de la ignición en zonas críticas. Mientras los sistemas satelitales son invaluables para el seguimiento a macroescala de la propagación de grandes incendios, este prototipo ofrece la ventaja táctica de generar una alerta en segundos tras la aparición de las primeras llamas, habilitando una respuesta rápida para extinguir el fuego antes de que se extienda y llenando así un vacío crítico que la tecnología satelital no puede cubrir.
Adicionalmente, es importante destacar que la validación del sistema se centró en condiciones controladas, diseñadas para simular los escenarios de alta luminosidad diurna más comunes durante la época de estiaje en la región de estudio. En consecuencia, los umbrales fijos empleados en los algoritmos basados en espacios de color fueron optimizados para estas condiciones específicas. Si bien este enfoque garantiza un alto rendimiento en el contexto evaluado, se reconoce que una generalización a otros entornos con diferente vegetación o clima requeriría un reajuste de dichos parámetros. Asimismo, el alcance del presente estudio no incluyó pruebas en condiciones de baja iluminación o nocturnas, lo que constituye una línea de trabajo futuro. Finalmente, para escenarios donde la visibilidad se vea reducida por humo denso, el sistema mitiga la dependencia visual mediante la integración del sensor de partículas PM2.5, que actúa como un mecanismo de confirmación no visual de la combustión.
Métricas de rendimiento del sistema
Para complementar el análisis de precisión, a continuación se evalúa la eficiencia operativa de cada algoritmo. Se monitorearon métricas clave como el consumo de CPU, uso de RAM, temperatura del procesador y consumo de corriente para identificar los métodos más adecuados para un sistema embebido de bajos recursos.
Evaluación de los algoritmos desarrollados
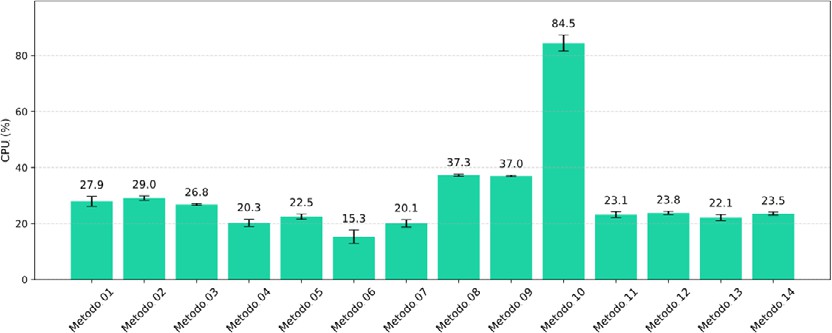
El gráfico correspondiente a la Figura 9 exhibe el porcentaje de uso de CPU registrado durante la ejecución de cada uno de los algoritmos evaluados. Se observa que el Método 10, correspondiente al clasificador Haar, alcanza un valor significativamente alto (84.5 %), lo que indica una alta demanda computacional y lo posiciona como una opción menos adecuada para sistemas embebidos. En contraste, el resto de los métodos muestra un uso de CPU considerablemente más bajo y estable, con valores que oscilan entre el 15.3 % y el 37.3 %, lo que los convierte en alternativas más eficientes y apropiadas para entornos con recursos limitados, al minimizar el riesgo de sobrecarga del procesador.
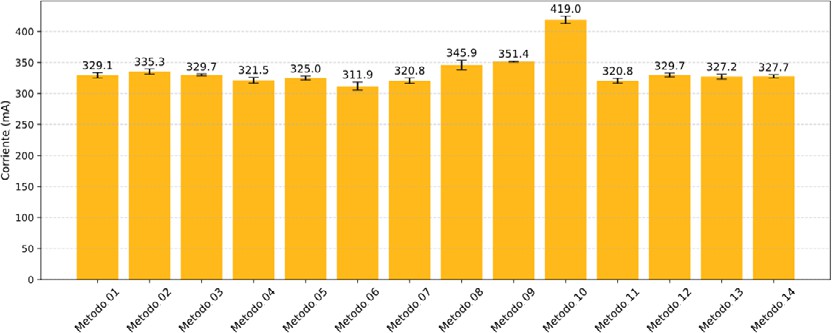
En cuanto al consumo de corriente, en la Figura 10 se observa que la mayoría de los métodos mantiene un consumo dentro del rango de 311 mA a 335 mA, lo cual resulta adecuado para sistemas con suministro energético limitado. No obstante, destacan tres métodos con consumos más elevados: el Método 8 (345.9 mA), el Método 9 (351.4 mA) y especialmente el Método 10, que alcanza los 419 mA. Este último representa una carga considerablemente mayor, lo que puede comprometer la autonomía energética en contextos remotos o alimentados por batería. Por tanto, algoritmos como los Métodos 6, 7 y 11 resultan más favorables para implementaciones eficientes desde el punto de vista energético.
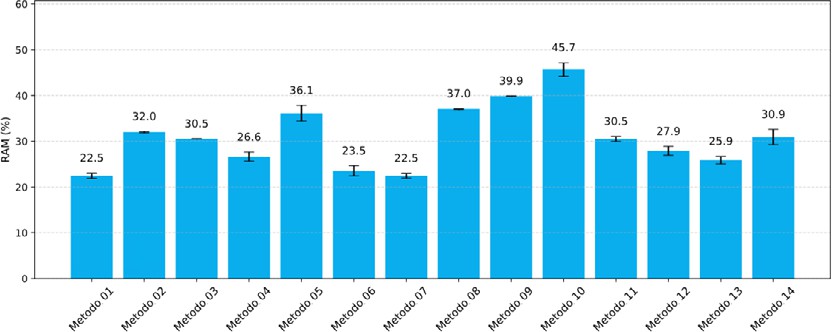
Respecto al uso de memoria RAM, en la Figura 11 se evidencia que el Método 10 destaca por su elevado consumo, alcanzando un 45.7 %, lo cual puede representar una limitante en sistemas embebidos con recursos restringidos. Le siguen el Método 9 (39.9 %) y el Método 8 (37.0 %), ambos significativamente por encima del promedio general. En contraste, los métodos restantes mantienen un perfil de uso más moderado, entre 22 % y 32 %, lo que los convierte en opciones más eficientes para dispositivos con capacidad limitada de memoria volátil.
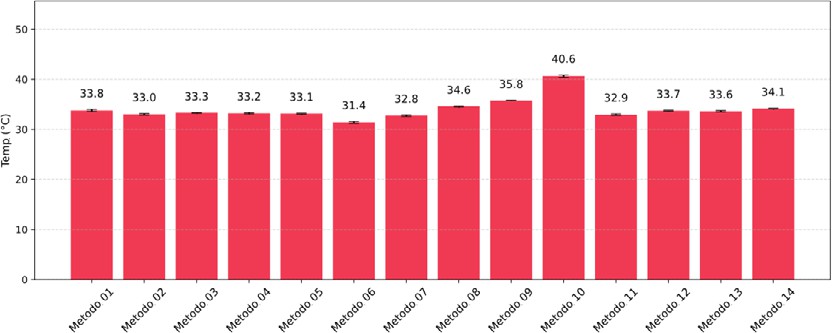
Finalmente, la Figura 12 presenta el comportamiento térmico del sistema, mostrando la temperatura de la CPU. Se observa un comportamiento térmico estable en la mayoría de los métodos, con valores promedio entre 31.4 °C y 35.8 °C. La única excepción notable es el Método 10, que alcanza una temperatura máxima de 40.6 °C, reflejo de su mayor exigencia computacional. Esta estabilidad térmica general resulta fundamental para garantizar la fiabilidad del sistema en aplicaciones de operación continua, y contribuye a preservar la integridad del hardware en entornos embebidos.
Con base en los resultados, se confirma que la selección de los Métodos 12 y 9 representa un balance deliberado entre precisión y eficiencia computacional. Se reconoce que el Método 9 (YOLOv8) presenta una de las demandas más altas de recursos, con un consumo de 351.4 mA y un 39.9 % de uso de RAM. Si bien este costo es manejable para la Raspberry Pi 4B del prototipo, sería un factor decisivo en dispositivos más limitados. No obstante, la arquitectura híbrida del sistema final está diseñada para mitigar esta carga, ya que no depende exclusivamente del modelo YOLOv8, sino que lo complementa con el Método 12, computacionalmente más ligero. Para un futuro despliegue en microcontroladores de menor capacidad, se podrían aplicar técnicas de optimización como la cuantización del modelo o el uso de versiones más ligeras para asegurar la viabilidad energética y de procesamiento.
Evaluación del sistema final
Para este apartado se evaluó el rendimiento operativo del sistema final en condiciones reales, considerando todos los módulos activos descritos en la Figura 4. Adicionalmente, se incorporó un sistema de ventilación automática, el cual se activa cuando la temperatura de la CPU supera los 60 °C, con el objetivo de preservar condiciones térmicas seguras durante la operación continua del sistema.
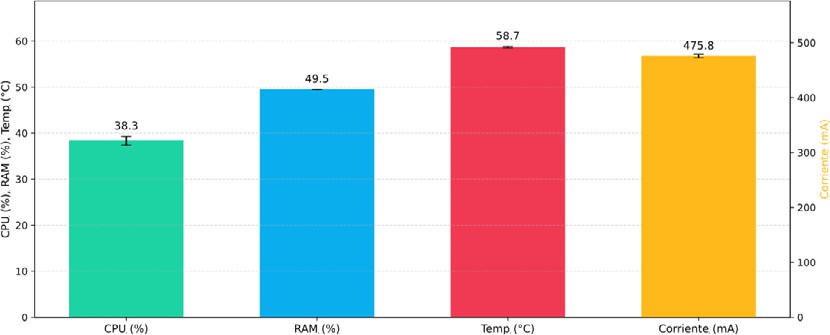
Las figuras 13 y 14 resumen las métricas obtenidas bajo dos configuraciones: con ventilación desactivada (Figura 13) y con ventilación activada (Figura 14). En ambos casos se monitorearon las métricas de uso de CPU, uso de RAM, temperatura del sistema y consumo de corriente. En la configuración sin ventilación, el sistema final presentó un uso de CPU del
38.3 %, RAM del 49.5 %, temperatura promedio de 58.7 °C y corriente de 475.8 mA. Si bien estos valores se mantienen dentro de márgenes aceptables, la temperatura se acerca al umbral de seguridad térmica.
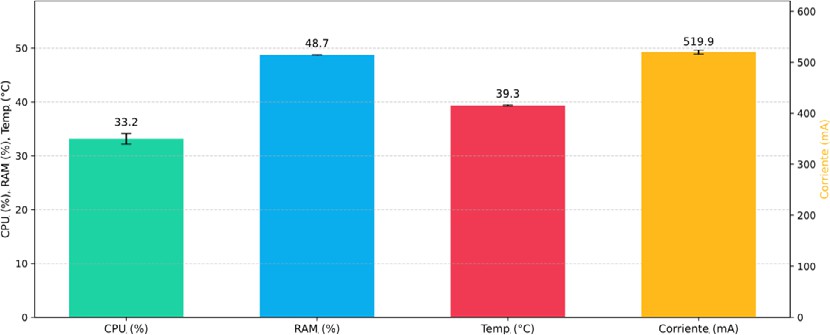
Una vez activada la ventilación, la temperatura del sistema se redujo drásticamente hasta 39.3 °C, asegurando una operación estable y prolongada. El resto de los parámetros se mantuvieron similares: el uso de CPU fue de 33.2 %, la RAM se estabilizó en 48.7 % y el
consumo de corriente aumentó levemente a 519.9 mA debido al funcionamiento del ventilador. Esta compensación resulta razonable considerando la mejora térmica obtenida.
Al comparar estos valores con los obtenidos en el escenario 1, se observa que la integración del sistema final, pese a añadir nuevos módulos como el sensor de partículas, el GPS y la conectividad 4G, mantiene un perfil de consumo equilibrado. De hecho, el uso de recursos sigue siendo menor o comparable al de métodos individuales, lo cual confirma la viabilidad de implementar esta solución en entornos reales. En conjunto, el sistema final no solo destaca por su precisión, sino también por su eficiencia operativa y robustez en condiciones prolongadas.
Funcionamiento del sistema final
El sistema final implementado integra múltiples componentes que trabajan de manera conjunta para detectar incendios forestales y generar alertas en tiempo real. El proceso se inicia con la adquisición continua de imágenes mediante una cámara instalada en el encapsulado del sistema. Las imágenes, capturadas cada 3 segundos, tienen una resolución de 960×720 píxeles. Esta configuración fue seleccionada de forma empírica, ya que proporciona un equilibrio adecuado entre fluidez de procesamiento y calidad de imagen. La alta definición es especialmente importante debido a la ubicación elevada de la cámara, lo cual exige un nivel de detalle suficiente para permitir la detección temprana de focos de incendio, incluso cuando las llamas aún son pequeñas. En la Figura 7 se muestra una imagen capturada de cada variación del escenario.
Una vez adquiridas las imágenes, estas son procesadas por los algoritmos de detección. En esta etapa, se evalúan tres enfoques distintos: el procesamiento mediante el Método 12 basado en espacios de color, el Método 9 fundamentado en IA con YOLOv8 y, finalmente, el procesamiento combinado implementado en el sistema final.
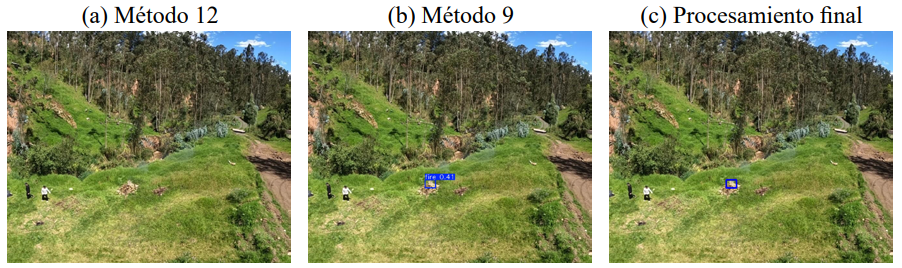
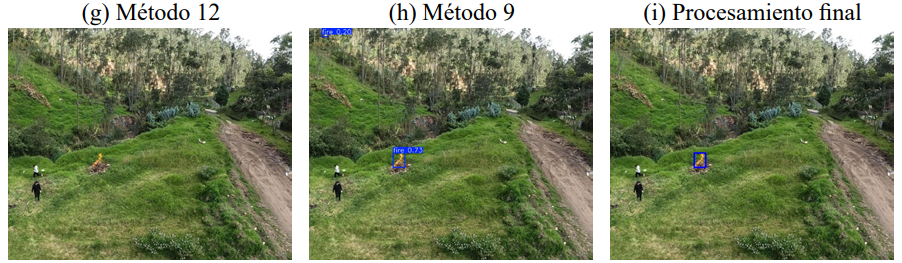
La Figura 15 muestra ejemplos representativos del comportamiento de cada uno de estos métodos frente a las tres variaciones del escenario evaluado. Se puede observar que, si bien los métodos individuales presentan ciertos errores, como omisiones en la detección por parte del algoritmo de espacios de color o detecciones erróneas en el modelo de IA, la combinación de ambos en el sistema final permite una corrección de estas inconsistencias. Esto se debe a la lógica de fusión implementada, la cual refuerza las detecciones únicamente cuando ambos métodos coinciden o cuando se detecta una región de fuego dominante por uno de los algoritmos y es respaldada parcialmente por el otro. Una vez detectado visualmente un posible foco de incendio, el sistema procede a validar dicha alerta mediante la medición de partículas en el aire.

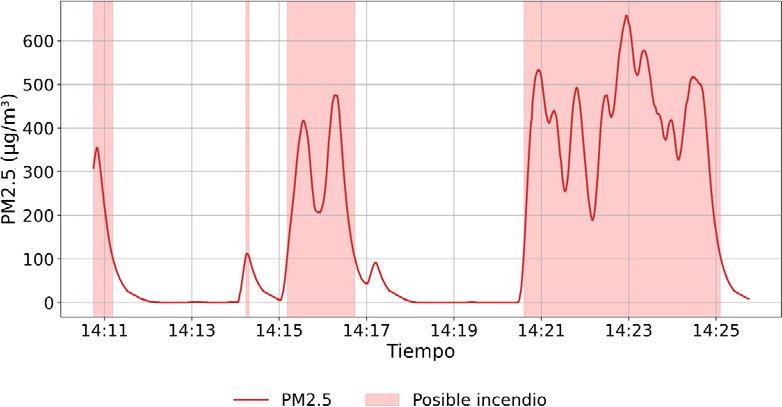
La Figura 16 presenta la evolución de la concentración de partículas PM2.5 posterior a la detección por procesamiento de imágenes. Si bien los incrementos registrados no alcanzan niveles extremos, sí se observan picos que superan el umbral establecido de 100 µg/m3, confirmando la presencia de humo en el entorno.
Esta variabilidad en las mediciones se explica tanto por la distancia entre el foco de fuego y el encapsulado como por la acción del viento, que en ciertos momentos alejaba la concentración de humo del sensor. No obstante, cuando la dirección del viento coincidió con la ubicación del encapsulado, se registraron concentraciones significativamente elevadas. Estas coincidencias temporales entre las detecciones visuales y los picos de material particulado refuerzan la fiabilidad del sistema final para validar siniestros en tiempo real.
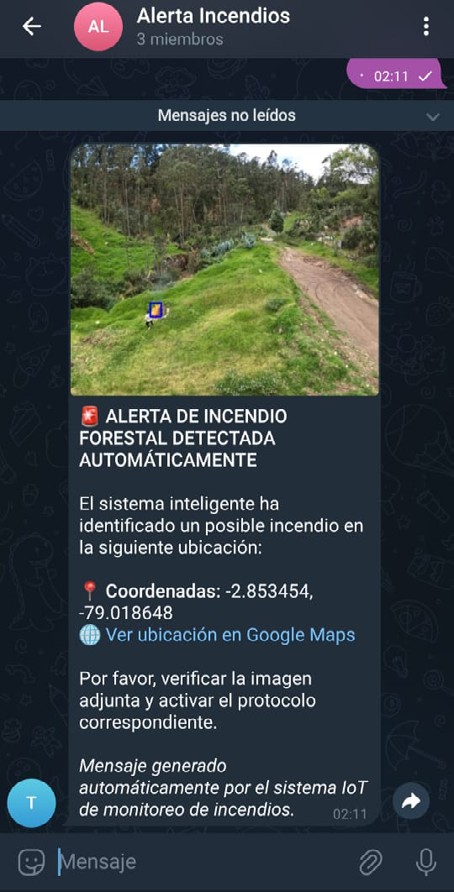
Finalmente, una vez verificada la presencia de un incendio, el sistema procede a emitir una alerta en tiempo real a través de la aplicación de mensajería Telegram. La Figura 17 muestra
un ejemplo de este mensaje automático, el cual incluye una imagen del evento detectado, las coordenadas geográficas exactas del siniestro y un enlace directo para visualizar la ubicación en Google Maps. Esta funcionalidad, soportada por el módulo GPS, permite una respuesta rápida y precisa por parte de los equipos encargados de la atención de emergencias, facilitando la verificación visual y la activación del protocolo correspondiente.
Conclusiones
Este trabajo presentó el desarrollo y la validación de un sistema inteligente de detección y alerta temprana de incendios forestales, basado en tecnologías IoT e IA. En la etapa de desarrollo se diseñaron y evaluaron 14 algoritmos distintos, abarcando enfoques basados en espacios de color y modelos de inteligencia artificial. A partir de esta evaluación comparativa, se consolidó una arquitectura híbrida que integra los métodos de mayor desempeño: un detector de objetos YOLOv8 (Método 9) y un algoritmo cromático multiespacio (Método 12), empleando una lógica de verificación cruzada. La validación del sistema final en escenarios realistas demostró su alta robustez, logrando una precisión del 99.82 % y una especificidad del 100 % en condiciones críticas de alta iluminación, superando significativamente el rendimiento de los métodos individuales.
Más allá de la precisión visual, la fiabilidad del sistema se ve reforzada por un mecanismo de doble verificación que utiliza un sensor de partículas PM2.5 para confirmar la presencia de humo, reduciendo eficazmente los falsos positivos. Su utilidad práctica se maximiza con la integración de módulos GPS y 4G, que permiten emitir alertas georreferenciadas en tiempo real a través de Telegram. Operativamente, el prototipo demostró ser viable para despliegues en campo, manteniendo un consumo energético moderado (519.9 mA) y una temperatura estable (39.3 °C) durante sesiones prolongadas. Estas métricas confirman la viabilidad de una solución precisa, eficiente y adaptable a otras aplicaciones de monitoreo ambiental.
Es fundamental reconocer que la efectividad de la funcionalidad de alerta en tiempo real depende de la disponibilidad de cobertura 4G, una limitación en áreas rurales remotas donde la infraestructura de telecomunicaciones es a menudo inexistente. Para superar esta barrera y abordar la escalabilidad para un despliegue masivo, el sistema actual ha sido concebido como un nodo concentrador dentro de una futura arquitectura de red de sensores distribuida.
Como trabajo a futuro, se planea expandir la solución mediante la implementación de múltiples nodos sensores de bajo consumo que se comuniquen a través de la tecnología LoRaWAN, integrando en cada uno el sensor INA219 para un monitoreo constante de su rendimiento energético, tal como se validó en la sección de resultados de este estudio. En este esquema, los nodos periféricos realizarían la captura de datos y enviarían alertas preliminares al nodo concentrador (el prototipo actual), el cual se encargaría del procesamiento avanzado, la confirmación del evento y la conexión con un punto lejano con cobertura para así emitir la alerta a las entidades pertinentes. Para asegurar la durabilidad y el bajo mantenimiento en dicho despliegue, se propone el uso de encapsulados con certificación IP67, protegiendo el hardware de condiciones ambientales adversas y reduciendo la frecuencia de las revisiones técnicas, un factor clave en áreas de difícil acceso.
Agradecimientos
Los autores agradecen al Departamento de Eléctrica, Electrónica y Telecomunicaciones de la Facultad de Ingeniería de la Universidad de Cuenca (DEET), por el apoyo brindado durante el desarrollo del presente trabajo de investigación.
Los autores declaran que, en la elaboración del presente artículo, se han utilizado herramientas de inteligencia artificial, como Gemini 2.5 Flash, de forma complementaria. Su uso ha sido sutil, principalmente para la reducción de texto en la sección de trabajos relacionados, con el fin de cumplir la normativa de extensión del artículo, y para estructurar de manera más clara las ideas en la sección de introducción.
Los autores declaran la contribución y participación equitativa de roles de autoría para
esta publicación.
Referencias
Alotaibi, E., & Nassif, N. (2024). Artificial intelligence in environmental monitoring: in-depth analysis. Discover Artificial Intelligence, 4(1), 1–26. https://doi.org/10.1007/s44163-024-00198-1
Altowaijri, A. H., Alfaifi, M. S., Alshawi, T. A., Ibrahim, A. B., & Alshebeili, S. A. (2021). A Privacy-Preserving Iot-Based Fire Detector. IEEE Access, 9, 51393–51402. https://doi.org/10.1109/ACCESS.2021.3069588
Anh, N. D., Van Thanh, P., Lap, D. T., Khai, N. T., Van An, T., Tan, T. D., An, N. H., & Dinh, D. N. (2022). Efficient Forest Fire Detection using Rule-Based Multi-color Space and Correlation Coefficient for Application in Unmanned Aerial Vehicles. KSII Transactions on Internet and Information Systems, 16(2), 381–404. https://doi.org/10.3837/TIIS.2022.02.002
Avazov, K., Hyun, A. E., Sami S, A. A., Khaitov, A., Abdusalomov, A. B., & Cho, Y. I. (2023). Forest Fire Detection and Notification Method Based on AI and IoT Approaches. Future Internet, 15(2). https://doi. org/10.3390/FI15020061
Bhargav, R., & Singh, P. (2025). Efficient UAV-Based Forest Fire Detection Using CNN and YOLOv8 Integration. 2025 6th International Conference on Recent Advances in Information Technology (RAIT), 1–6. https:// doi.org/10.1109/RAIT65068.2025.11089330
Buza, E., & Akagic, A. (2022). Unsupervised Method for Wildfire Flame Segmentation and Detection. IEEE Access, 10, 55213–55225. https://doi.org/10.1109/ACCESS.2022.3176724
Celik, T., Ozkaramanli, H., & Demirel, H. (2007). Fire Pixel Classification using Fuzzy Logic and Statistical Color Model. 2007 IEEE International Conference on Acoustics, Speech and Signal Processing - ICASSP ’07, 1, I-1205-I–1208. https://doi.org/10.1109/ICASSP.2007.366130
Dilshad, N., Khan, S. U., Alghamdi, N. S., Taleb, T., & Song, J. S. (2024). Toward Efficient Fire Detection in IoT Environment: A Modified Attention Network and Large-Scale Data Set. IEEE Internet of Things Journal, 11(8), 13467–13481. https://doi.org/10.1109/JIOT.2023.3336931
Hamida, A. B., Amar, C. B., & Albagory, Y. (2022). A New Color Model for Fire Pixels Detection in PJF Color Space. Intelligent Automation and Soft Computing, 33, 1607–1621. https://doi.org/10.32604/ iasc.2022.024939
Kaggle. (s/f). Find Open Datasets and Machine Learning Projects. Recuperado el 20 de noviembre de 2024, de https://www.kaggle.com/datasets
Koschan, A., & Abidi, M. A. (2008). Digital color image processing. Wiley-Interscience. https://doi. org/10.1002/9780470230367
Lee, C. H., Lee, W. H., & Kim, S. M. (2023). Development of IoT-Based Real-Time Fire Detection System Using Raspberry Pi and Fisheye Camera. Applied Sciences 2023, Vol. 13, Page 8568, 13(15), 8568. https://doi. org/10.3390/APP13158568
Miller, T., Durlik, I., Kostecka, E., Kozlovska, P., Łobodzińska, A., Sokołowska, S., & Nowy, A. (2025). Integrating Artificial Intelligence Agents with the Internet of Things for Enhanced Environmental Monitoring: Applications in Water Quality and Climate Data. Electronics 2025, Vol. 14, Page 696, 14(4), 696. https:// doi.org/10.3390/ELECTRONICS14040696
Moreno Rubio, I. (2021). Detección de incendios en áreas forestales usando algoritmos de deep learning [Tesis de Grado, Universidad de Jaén]. http://crea.ujaen.es/jspui/handle/10953.1/20283
Organización Meteorológica Mundial. (2024, noviembre 11). El año 2024 va camino de ser el más cálido jamás registrado en un momento en que el calentamiento supera transitoriamente el umbral de 1,5 °C. Organización Meteorológica Mundial. https://wmo.int/es/news/media-centre/el-ano-2024-va-camino-de- ser-el-mas-calido-jamas-registrado-en-un-momento-en-que-el-calentamiento
Pranamurti, H., Murti, A., & Setianingsih, C. (2019). Fire Detection Use CCTV with Image Processing Based Raspberry Pi. Journal of Physics: Conference Series, 1201(1), 012015. https://doi.org/10.1088/1742- 6596/1201/1/012015
Rashkovetsky, D., Mauracher, F., Langer, M., & Schmitt, M. (2021). Wildfire Detection from Multisensor Satellite Imagery Using Deep Semantic Segmentation. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 14, 7001–7016. https://doi.org/10.1109/JSTARS.2021.3093625
Roboflow. (2020). Roboflow: Computer vision tools for developers and enterprises. https://roboflow.com/
Secretaría Nacional de Gestión de Riesgos. (2024). Incendios Forestales 2024. Gobierno de Ecuador – Secretaría Nacional de Gestión de Riesgos. https://www.gestionderiesgos.gob.ec/incendios-forestales-2024/
Secretaría Nacional de Gestión de Riesgos. (2025, febrero 24). Niveles de alertas y declaratorias vigentes establecidas por la SNGR. Gobierno de Ecuador – Secretaría Nacional de Gestión de Riesgos. https:// www.gestionderiesgos.gob.ec/niveles-de-alertas-y-declaratorias-vigentes-establecidas-por-la-sgr/
Shrestha, B. (2020). Fire Detection Using Image Processing. http://www.theseus.fi/handle/10024/312830 Talaat, F. M., & ZainEldin, H. (2023). An improved fire detection approach based on YOLO-v8 for smart cities.
ZainEldin, H. (2023). An improved fire detection approach based on YOLO-v8 for smart cities. Neural Computing and Applications, 35(28), 20939–20954. https://doi.org/10.1007/s00521-023-08809-1
Texas Instruments. (2008). INA219. www.ti.com
Vasconcelos, R. N., Franca Rocha, W. J. S., Costa, D. P., Duverger, S. G., Santana, M. M. M. de, Cambui, E. C. B., Ferreira-Ferreira, J., Oliveira, M., Barbosa, L. da S., & Cordeiro, C. L. (2024). Fire Detection with Deep Learning: A Comprehensive Review. Land, 13(10), 1696. https://doi.org/10.3390/land13101696
Waveshare. (2021). SIM7600X 4G & LTE Cat-1 HAT. https://www.waveshare.com/wiki/SIM7600X_4G_%26_ LTE_Cat-1_HAT
Wu, Y., Wang, Z., Liu, S., Zhou, Y., Liu, G., & Xie, G. (2024). Flame detection method and application based on RGB-HSI model and initial flame growth characteristics. Journal of Physics: Conference Series, 2752(1), 012231. https://doi.org/10.1088/1742-6596/2752/1/012231
Xing, X., Murdoch, S., Tang, C., Papanastasiou, G., Cross-Zamirski, J., Guo, Y., Xiao, X., Schönlieb, C. B., Wang, Y., & Yang, G. (2024). Can generative AI replace immunofluorescent staining processes? A comparison study of synthetically generated cellpainting images from brightfield. Computers in Biology and Medicine, 182, 109102. https://doi.org/10.1016/J.COMPBIOMED.2024.109102
Yang, S., Huang, Q., & Yu, M. (2024). Advancements in remote sensing for active fire detection: A review of datasets and methods. Science of The Total Environment, 943, 173273. https://doi.org/10.1016/J. SCITOTENV.2024.173273
Zhou, Yong, & Zheng, H. (2016). Digital universal particle concentration sensor PMS5003 series data manual. https://www.aqmd.gov/docs/default-source/aq-spec/resources-page/plantower-pms5003-manual_v2-3.pdf

