1. Introducción
Las plantas forman parte importante de la estética de un hogar, traen bienestar y cumplen con otras funciones importantes, como suplir de oxígeno y mantener la calidad del aire [1]. El único inconveniente que presentan es el cuidado que se les debe dar, especialmente la tarea del riego de estas, la cual se hace especialmente tediosa cuando se cuenta con un espacio con gran cantidad de plantas.
Además, aunque se tenga un horario de riego establecido, sea todos los días o cada cierta cantidad de días, no todas las plantas requieren de la misma cantidad de agua, ni la requieren
con la misma frecuencia [2], por lo que se cae en el riesgo de regar demasiado la planta, lo que resulta en saturar el suelo y ahogar la raíz y se puede perder la planta [3]. Por otro lado, si no se riega con la suficiente frecuencia o la cantidad suficiente de agua, también se corre el riesgo de llegar al punto de marchitez permanente, ocasionando que la planta se seque y muera [4].
En otra escala, como el caso de huertos para la cosecha de alimentos o venta de plantas ornamentales, se cuenta con cientos de plantas distribuidas en grandes espacios, donde la tarea del riego se vuelve aún más agotadora, y aunque se use
un sistema de riego, se corre el riesgo de no atender a las necesidades específicas de cada especie de planta y afectar su salud.
El riego adecuado es primordial para la salud de la planta, ya que el agua proporciona a las plantas los minerales que necesita para realizar el proceso de fotosíntesis. Por otro lado, al conocer las necesidades de cada planta, se puede hacer un uso más eficiente del agua, promoviendo su conservación.
Se ha realizado una revisión literaria para conocer los desarrollos recientes en proyectos que responden a la necesidad planteada, además de dar a conocer los posibles avances que se pueden brindar. En los trabajos consultados [5- 8], un robot transporta el agua para el riego en un reservorio, lo que limita su velocidad e introduce la necesidad de que el usuario rellene el tanque para poder continuar con el riego. Los trabajos difieren principalmente en el método de localización e identificación de las plantas, y coinciden en colocar el módulo de medición de humedad en cada planta del jardín.
En [5] y [6], el robot recorre el jardín por un camino preestablecido e identifica las plantas por medio de etiquetas RFID (tecnología de identificación por radiofrecuencia) colocados en cada maceta, mientras que el módulo de lectura se ubica en el robot. En ambos trabajos, se ubica un sensor de humedad en cada planta y, por medio de microcontroladores, genera una señal almacenada en la etiqueta (tag) RFID que indicará al robot si debe activar la bomba para verter el agua que transporta.
En [7], el robot identifica las plantas por medio códigos visuales colocados en cada planta e identificados por una cámara en el robot. Las plantas están dispuestas en una forma cuadrada o rectangular, por lo que el robot realiza el movimiento siguiendo las plantas que encuentra en su camino y utiliza un sensor ultrasónico para identificar y evadir obstáculos. En este trabajo, los autores asumen igual condición de humedad en todas las plantas, pues se encuentran en el mismo ambiente, por lo que la medición se realiza en una sola planta, donde se identifica la necesidad de agua y se envía esta señal al robot por medio de un módulo Zigbee, la cual activa al robot empezando el recorrido.
En [8], se mide la humedad en el suelo de un huerto, donde las plantas están ubicadas en filas e igualmente separadas. La información de humedad de cada planta se plasma en una pantalla LCD, además de ser enviada al robot por módulos Xbee. En este trabajo, el robot se moviliza siguiendo una línea negra sobre una superficie blanca, la cual identifica por medio de dos sensores infrarrojos. En este caso, por tratarse de un huerto, y no de plantas en macetas, el riego se realiza rociando agua a las plantas a su alrededor, por lo que es vital que estén ubicadas en la posición donde alcance el radio de rocío del robot.
La principal limitante en los prototipos antes mencionados es el transporte del tanque de agua por el robot, lo que ocasiona una capacidad limitada de carga, obligando al usuario a rellenar el tanque cada vez que se vacía o que el nivel de agua esté por debajo de un valor establecido.
Como una solución a la tarea del riego, para asegurar su efectividad, y hacer un uso eficiente del agua, se propone la implementación de un sistema de riego automático, asistido por un robot, que se encarga de tomar las mediciones de humedad en todas las plantas del jardín o huerto y, basado en parámetros preestablecidos, decida si es necesario regar o no la planta. Por medio de comunicación Wi-Fi, el robot envía una señal al sistema de riego autónomo, donde se activarán las bombas correspondientes a las plantas que necesitan ser regadas. De esta manera, se elimina la necesidad de que el robot transporte el agua que se utilizará, convirtiéndose en un sistema autónomo alimentado por baterías y que no necesita otra acción por parte del usuario, únicamente para ser activado. El resto del artículo se distribuye de la siguiente manera: la sección 2 describe los pasos y consideraciones en la selección de componentes para el desarrollo y construcción del prototipo. La sección 3 presenta los resultados donde se evidencia la construcción y pruebas realizadas al prototipo, describiendo el desempeño del sistema y proponiendo soluciones a las dificultades encontradas. Además, se presentan posibles trabajos futuros en esta línea de investigación. Finalmente, en la sección 4 se presentan las principales conclusiones sobre el
prototipo propuesto en este manuscrito.
2. Diseño y metodología
El proyecto se ha divido en etapas, según los sistemas que compondrán el proyecto, procediéndose a unificar todas las partes del sistema en la etapa final. La etapa más importante del proyecto es el sistema de medición y riego, pues es la base a partir de la cual se hacen las mejoras y modificaciones propuestas, como lo es la automatización de ese proceso, tanto del movimiento del robot a través del jardín, como de la identificación de las plantas para realizar el proceso de medición y, por consiguiente, la decisión sobre el riego.
A continuación, se describen los componentes utilizados en el desarrollo del prototipo.
2.1 Higrómetro de suelo
Es un sensor analógico, el cual mide el nivel de humedad en el suelo por medición capacitiva, es decir, que la capacitancia varía según el contenido de agua presente en el suelo. Este valor es comunicado por el sensor mediante un nivel de voltaje inversamente proporcional a la humedad del suelo [9], el cual es transformado por el microcontrolador a un nivel binario equivalente, y posteriormente convertido a un valor porcentual.
Para poder establecer los rangos que determinarán la necesidad de riego de las plantas se realizaron pruebas en una muestra de cinco plantas distintas, ubicadas en un mismo lugar, a lo largo de seis días, para apreciar la variación en el consumo de agua de cada una y así establecer los límites de humedad aceptables y el nivel al que se determinará que la planta
necesitará ser regada. Se realizaron dos mediciones en cada planta, la primera para determinar los niveles de humedad iniciales y estimar la necesidad de riego de la planta; la segunda, en el caso de que la planta se haya regado, para determinar los niveles de humedad posterior al riego y así
estimar el rango en el que las plantas no necesitarán ser regadas.
Las mediciones obtenidas se muestran en la figura 1, graficado porcentaje de humedad vs. planta. A pesar de que las plantas están ubicadas en un mismo ambiente, se trata de diversos tipos de plantas por lo que su consumo de agua es
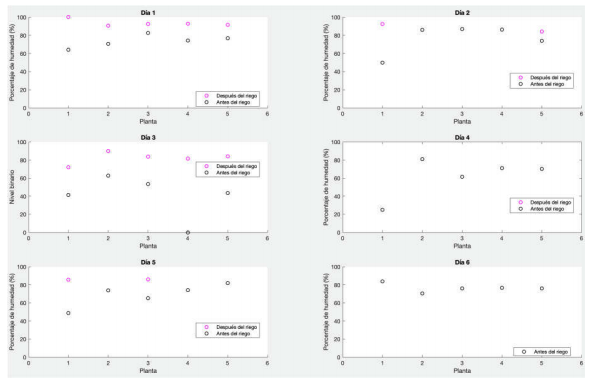 Figura 1.
Ensayos de mediciones en cinco plantas a lo largo de seis días.
Figura 1.
Ensayos de mediciones en cinco plantas a lo largo de seis días.
ariado y no tienen las mismas necesidades de riego entre ellas. De estas pruebas, se observa que las plantas que obtienen mediciones por encima de 68.86% tienen al tacto una humedad adecuada, y a valores inferiores la tierra se siente más seca, por lo que se selecciona este valor como el límite de humedad aceptable, siendo así que todas las plantas que muestren una medición inferior a esta serán regadas y las tengan un nivel por encima del 68.86% de humedad no necesitarán ser regadas. Entonces, esta medición es enviada inalámbricamente al sistema de riego, donde se toma la decisión de riego y se
almacena la información de la planta que se ha atendido.
2.2 Módulo de relés y bombas
Estos módulos constituyen el sistema de riego, el cual es activado según la información recopilada por el sensor de humedad. Dependiendo de la instrucción recibida desde el sistema de medición, se activa el relé correspondiente a la planta que necesita ser regada, activando consecuentemente la bomba que permitirá el paso de agua a la planta.
Para poder determinar la cantidad de agua que debe ser irrigada a la planta, se realizaron pruebas en tres plantas que, según la medición tomada necesitaban ser regadas y se midió el volumen de agua consumida por la planta hasta llegar a una lectura de humedad por debajo del umbral establecido como aceptable. Los niveles de humedad previos y posteriores al riego, así como el volumen de agua se muestran en la tabla 1.
Tabla 1.
Pruebas para determinar el volumen de agua requerido
 Ha representa el nivel
de humedad previo al riego, Hb
representa el nivel de humedad posterior al riego y V representa el volumen de agua.
Ha representa el nivel
de humedad previo al riego, Hb
representa el nivel de humedad posterior al riego y V representa el volumen de agua.
|
#
|
Ha (%)
|
Hb (%)
|
V (ml)
|
|
1
|
41.21
|
84.17
|
180
|
|
2
|
48.79
|
85.91
|
120
|
|
3
|
65.30
|
83.86
|
80
|
A partir de estas pruebas se establecieron tres rangos de la cantidad de agua que será distribuida a la planta, según la medición obtenida, siendo que, cuando se obtenga una medición mayor a 65.3% y menor a 68%, se verterán 80 ml de
agua. Para lecturas mayores a 48.79% y menores a 65.3% se verterán 160 ml de agua y para toda lectura menor a 48.79% se verterán 180 ml de agua.
Una vez establecido el volumen de agua que deberá ser entregado a cada planta, se debe determinar el tiempo durante el cual estará activado el relé que controla la bomba, por medio de la cual se hace llegar el agua a la planta. Para ello, se midió el volumen de agua entregado por la bomba a través de la manguera que entrega el agua a la planta y el tiempo que demoró en obtenerse ese volumen. De esta manera, el caudal se calcula según la ecuación (1).
Donde:
Q: caudal
en ml/s
V: volumen de agua en ml
t: tiempo
en segundos
Así, el caudal del sistema es calculado
como 16.36 ml/s, lo que permitirá calcular el tiempo de activación del
relé según las necesidades
volumétricas de agua de cada planta, por medio
de la ecuación (2).
Donde:
t: tiempo en segundos
V: volumen de agua en ml
Q: caudal en ml/s
2.3 Microcontroladores ESP32
Los ESP32 son
microcontroladores de bajo consumo con propiedades como comunicación Wi-Fi y Bluetooth, permitiéndoles tener una configuración maestro-esclavo (sender-receiver) entre dos microcontroladores, donde la tarjeta configurada como maestro envía señales
a la tarjeta esclava para que esta ejecute una acción.
En el desarrollo de este proyecto,
se utilizan dos microcontroladores ESP32,
uno en configuración sender y el segundo en configuración receiver y son utilizados, respectivamente, en la etapa de medición y riego del sistema.
Con el objetivo de
reducir el consumo de corriente y así aumentar el
ciclo de carga de las fuentes de energía del sistema, se programa en los
microcontroladores la función de deep sleep, de manera que, tras un período
de inactividad mayor a 60 segundos,
el sistema entrará en reposo y no se volverá a
activar hasta que el usuario así lo indique.
El ESP32 en
configuración sender es el encargado
de controlar el procedimiento de medición de humedad y enviar esa información al ESP32 en configuración receiver, donde se toma la decisión de regar
la planta o no, y la cantidad
de agua que se
suministrará.
2.4 Brazo mecánico
Para poder llevar a
cabo el procedimiento de medición antes descrito,
específicamente el de inserción del sensor en la tierra, es necesario diseñar
un sistema mecánico que tenga libertad de movimiento para maniobrar y posicionar el sensor en la tierra
a una profundidad adecuada.
Para esto, se diseñó un brazo mecánico
que será construido con piezas impresas en 3D, las cuales deben ser
capaces de soportar el peso de
los motores que impulsarán el movimiento del brazo, ver figura 2.
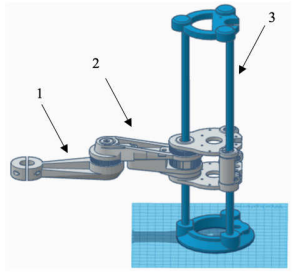 Figura 2.
Diseño de piezas que conformarán el brazo mecánico.
Figura 2.
Diseño de piezas que conformarán el brazo mecánico.
El movimiento del
brazo será realizado en tres etapas, partiendo
de la posición inicial en la que el brazo se encuentra a la posición más elevada y las dos
piezas que conforman la extensión del
brazo, 1 y 2, como se muestra en la figura 2,
estarán recogidas a un costado. Cuando se va a realizar la medición, se extenderán las piezas 2 y 1,
en ese orden, para luego hacer
descender el brazo a lo largo de las varillas
en las que se hace el movimiento vertical, pieza 3.
Además, para
controlar la posición vertical del brazo, se
coloca un sensor de proximidad infrarrojo, colocado en el extremo
de la pieza 1, para medir la distancia de este extremo
a la tierra y así determinar si el sensor se encuentra a una profundidad adecuada.
Para realizar
el movimiento del brazo descrito,
se seleccionan tres motores de paso NEMA 17, por el
nivel de par (torque) que proporcionan y su alto grado de precisión, lo
que
es conveniente para controlar la posición del brazo
2.5 Armadura del robot
Finalmente, es necesaria la construcción de una estructura que sea capaz de sostener el peso de los sistemas que van incorporados en él y que no agregue un esfuerzo adicional para el movimiento del robot. Por esta razón, se resuelve trabajar con una estructura de aleación de aluminio, por ser un material liviano pero resistente al peso.
El robot es impulsado por dos motores de 12 Vcc alimentados con baterías de 12 V, 9 Ah y 108 Wh. Las ruedas utilizadas son de tipo oruga, las cuales han sido seleccionadas por la alta versatilidad que ofrecen en los tipos de suelos en los que se pueden desplazar y facilitan el control del movimiento del robot. El desplazamiento del robot es controlado por un microcontrolador ESP32, cuyas funciones se especifican en la siguiente sección.
Adicionalmente, se incorpora un sensor ultrasónico en el frente del robot, para detectar el fin del recorrido, lo que hará que el robot retorne a su posición original.
2.6 Control remoto del robot
Como una facilidad al usuario y haciendo uso de la capacidad
de comunicación inalámbrica con el ESP32, se decide habilitar el control del robot por medio de una página web, donde el usuario puede indicar al
sistema que inicie el procedimiento y
si así lo desea, finalizarlo antes de que el robot haya realizado todo su
recorrido. La figura 3 muestra un diagrama
de flujo simplificado del proceso, mientras que un diagrama de flujo completo del procedimiento está disponible en [10].
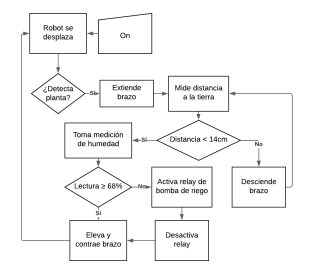 Figura 3.
Diagrama de flujo simplificado del procedimiento.
Figura 3.
Diagrama de flujo simplificado del procedimiento.
2.7 Identificación de las plantas
Se coloca un sensor infrarrojo al costado derecho del robot, anclado a la estructura de la base, a la altura de la rueda, el cual
será activado al aproximarse a una maceta, lo cual indicará al robot que debe detenerse para realizar la medición.
Además, se incorpora un ESP-CAM, que permite tomar imágenes cuando se ha detectado un objeto y confirmar que se trata de una planta y enviar las imágenes por medio de la plataforma de mensajería Telegram, lo que permite al usuario visualizar las imágenes de las plantas atendidas, desde dónde esté localizado.
3. Resultados
El procedimiento en la construcción del prototipo y el uso de los materiales utilizados se describió en la metodología, incorporando oportunidades de mejora del sistema percibidas en el proceso.
El prototipo fue sometido a pruebas en un espacio controlado, con plantas distribuidas en filas, separadas uniformemente y en macetas de igual tamaño.
3.1 Construcción y validación del prototipo
Al momento de realizar pruebas con el brazo mecánico, se observó que el sensor de humedad podía sufrir daños debido a la presión que se ejercía sobre él, al ser insertado en la tierra. Por lo tanto, se adicionó una extensión de acrílico, de manera que, el sensor se sujeta a ella para darle mayor firmeza, y esta unión se coloca en la punta del brazo mecánico (pieza 1 de la figura 2). Se realizaron pruebas con la adición realizada y se pudo observar que el sensor se insertaba con mayor suavidad por lo que se decidió mantener la pieza en el diseño.
Otra dificultad observada, fue que, al iniciar el movimiento vertical del brazo, para descender e insertar el sensor en la tierra, si la velocidad con la que se realizaba este movimiento era muy elevada, las piezas tenían dificultades para moverse adecuadamente, lo que ejercía un trabajo adicional al motor y podía acabar por dañarlo. Por esta razón, se realizó una modificación en la programación del movimiento del brazo, de manera que, al iniciar el descenso, aumente progresivamente su velocidad en una proporción inversa a la distancia a la que se encuentra de la tierra.
Habiendo realizado estas modificaciones se hicieron más pruebas, como se aprecia en la figura 4a, donde el robot está detenido al lado de la planta a la que va a hacer la medición y sobre la que está descendiendo el brazo. En la figura 4b, se puede observar cómo se activó el riego para la planta en la que acaba de medir. En la figura se señala cómo el agua es distribuida por medio de una válvula. Un vídeo demostrando el proceso está disponible en [10].
3.2 Oportunidades de desarrollo del prototipo
El prototipo desarrollado va dirigido a toda persona que cuente con un jardín con un número de plantas considerable y a quien se le dificulte o resulte tediosa la tarea de monitorear y regar las plantas. También, va destinado a viveros o huertos, donde se cuenta con extensiones de terreno para el crecimiento de plantas o cultivos para la venta, donde el uso del sistema
automático proporciona un mejor control de la cantidad de agua suministrada a cada planta, en lugar de rociar todo el cultivo por igual, sin diferenciar por tamaño o tipo de planta, lo que influye en su consumo de agua.
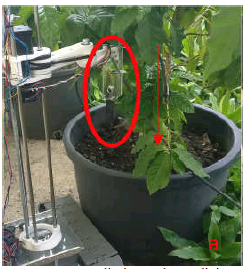 Figura 4a.
Procedimiento de medición de la humedad en la tierra
de una planta. Se señala el sensor de humedad y el movimiento de descenso del
brazo mecánico.
Figura 4a.
Procedimiento de medición de la humedad en la tierra
de una planta. Se señala el sensor de humedad y el movimiento de descenso del
brazo mecánico.
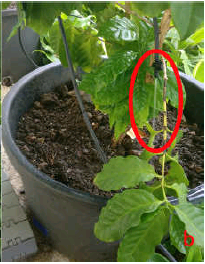 Figura 4b.
Activación del
riego. Se señala la distribución del agua por medio de la válvula.
Figura 4b.
Activación del
riego. Se señala la distribución del agua por medio de la válvula.
Una ventaja del prototipo sobre otras soluciones disponibles es el sistema de riego independiente, por lo
que no hay limitante en la cantidad de plantas que pueden ser atendidas,
ya que el robot se encarga únicamente de tomar mediciones y decidir si la planta necesita agua, además de eliminar las limitaciones al no
transportar el agua para el riego como se observa en otras propuestas.
3.3 Trabajo futuro
Como trabajo futuro a considerar, es el uso de codificadores en las ruedas, puesto que se observó una ligera desviación en la trayectoria del robot, lo que puede ser corregido controlando la velocidad de los motores. Además, la incorporación de este elemento permitirá tener un control más preciso de la dirección del robot y así, eliminar la limitante del movimiento en línea recta.
Se contempla colocar dos cámaras en el robot, para tomar imágenes de las hojas de la planta y de su tallo, proporcionando la ventaja de poder obtener imágenes con mayor precisión de las partes de la planta, sobre otras tecnologías que solo permiten capturar imágenes a mayor distancia. Además, la captura de estas imágenes abre las puertas al análisis de las mismas, para clasificarlas y atender las necesidades específicas según el tipo de plantas y evaluar problemas fitosanitarios y de nutrición vegetal.
4. Conclusiones
Se desarrolló un prototipo capaz de realizar mediciones a las plantas de un jardín determinado y activar el sistema de riego, brindando así una solución autónoma a un problema presente en la vida de muchas personas, y una herramienta útil en los cultivos para la venta.
La instalación de la cámara como una herramienta para capturar y enviar imágenes permite utilizar las imágenes recopiladas para la detección de problemas fitosanitarios y aspectos de nutrición vegetal, además de que permite hacer una clasificación por tipo de planta, lo que permitirá una atención más específica según las características de cada una.
Finalmente, el prototipo permite un uso más eficiente del agua, además de controlar el consumo de este vital líquido, atendiendo a las necesidades específicas de cada planta, realizando un suministro adecuado para mantener la salud de las plantas y que así puedan cumplir con todas sus funciones.
Agradecimientos
A la Universidad Tecnológica de Panamá, por abrir el espacio para el desarrollo y la presentación de proyectos innovadores e investigaciones provechosas para la comunidad.
Referencias
[1] B.C. Wolverton, A. Johnson y K. Bounds, “Interior Landscape Plants for Indoor Air Pollution Abatement: Final Report”, National Aeronautics and Space Administration (NASA-TM- 101768) Science and Technology Laboratory, Stennis Space Center, 1989.
[2] M. Van Iersel, S. Burnett y J. Kim, “How much water do your plants really need?”, greenhousemag.com, párr. 6, 12 marzo 2010. [En línea]. Disponible en: https://www.greenhousemag.com/article/gmpro-0310-water- plants-automating-irrigation/. [Último acceso: 13-octubre- 2020].
[3] B. Chandler, “How to save an over-watered plant”, homeguides.sfgate.com, párr. 2, 18 diciembre 2020. [En línea.] Disponible en: https://homeguides.sfgate.com/save- overwatered-plant-22932.html. [Último acceso: 13-octubre- 2020].
[4] M.E. Ellis, “Signs of under watering plants: how can you tell plants have too little water”, gardeningdknowhow, párr.2, 13 Septiembre 2019. [En línea.] Disponible en: https://www.gardeningknowhow.com/plant- problems/environmental/under-watering.htm. [Último acceso: 13 octubre, 2020].
[5] M. Vucha, K. Jyothi, K. Kumari y R. Karthik, “Cost Effective Autonomous Plant Watering Robot,” International Journal of Recent Technology and Engineering (IJRTE), vol. 7, no. 5, Enero 2019. [En línea]. Disponible: https://www.ijrte.org/wp- content/uploads/papers/v7i5/E1961017519.pdf. [Último acceso: 25-agosto-2020].
[6] N. Hema, R. Aswani y M. Malik, “Plant Watering Autonomous Mobile Robot,” International Journal of Robotics and Automation (IJRA), vol. 1, no. 3, Septiembre 2012. Disponible: https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.934
[7] R. Aswani y N. Hema, “RoboGardner: A Low-Cost System with Automatic Plant Identification Using Marker.” In Proc. International Conference on Heterogeneous Networking for Quality, Reliability, Security and Robustness, 2013, pp. 309- 324.
[8] A. Adeodu, O. Bodunde, I. Daniyan, O. Omitola, J, Akinyoola y U. Adie, “Development of an autonomous mobile plant
irrigation robot
for semi structured environment.” In Proc. 2nd International Conference on Sustainable
Materials Processing and Manufacturing, 2019, pp. 9-15.
[9] J. Hrisko, “Capacitive soil moisture sensor theory, calibration and testing,” Maker Portal LLC, New York, 5 Julio 2020.
[10] A. Ríos, "Sistema de irrigación automático asistido por robot – Google Drive", Drive.google.com, 2020. [En Línea]. Disponible: https://bit.ly/3dD12zz.