Resumen: Se presentará un estado del arte de los exoesqueletos más relevantes a nivel mundial, y a partir de ello, se realizará un análisis del movimiento de la extremidad superior, enfocado en los movimientos del antebrazo y la muñeca, teniendo en cuenta los puntos y ángulos con sus grados de libertad para evaluar en la extensión y la flexión. Se dan a conocer los tipos de movimientos para los músculos distales y proximales, así como la función del ejercicio más adecuada para la recuperación de acuerdo con la señal de electromiografía (EMG) se define la mejor terapia, pasiva o activa, mediante un modelado cinético del movimiento en el tipo de terapia, a partir del modelo matemático JERK a través de las funciones de MATLAB.
Palabras clave: dinámica, exoesqueleto, electromiografía, prototipos, sensores.
Abstract: A state of the art of the most relevant exoskeletons worldwide, will be presented, and from this, an analysis of the movement of the upper extremity will be performed, focusing on the movements of the forearm and the wrist, taking into account the points and angles with their Degrees of freedom to evaluate in extension and flexion. The types of movements for distal and proximal muscles are known, as well as the most appropriate function of exercise for recovery, according to the electromyography signal (EMG); there is defined the best therapy, passive or active, by means of a kinetic modeling of the movement in the type of therapy, from the mathematical model JERK through the MATLAB functions.
Keywords: dynamics, electromyography, exoskeleton, prototypes, sensors.
Artículo de revisión
ANÁLISIS DEL EXOESQUELETO PARA LA RECUPERACIÓN DEL DAÑO EN EL SISTEMA LOCOMOTOR A PARTIR DE UN SENSOR PARA LA EXTENSIÓN Y FLEXIÓN DEL BRAZO
ANALYSIS OF THE EXOSKELETON FOR THE RECOVERY OF THE DAMAGE IN THE LOCOMOTIVE SYSTEM FROM A SENSOR FOR THE EXTENSION AND FLEXION OF THE ARM
Recepción: 12 Noviembre 2017
Aprobación: 25 Noviembre 2017
En Colombia, actualmente, hay desarrollos en forma de réplica de investigaciones adelantadas en el exterior, pero ningún tipo de innovación hacia los exoesqueletos de miembro superior para realizar rehabilitación neuromotora en el sistema locomotor de tren superior (Kwakkel, Kollen & Krebs, 2008). La recuperación de las extremidades superiores, en la mayoría de veces, es muy difícil y conlleva meses de tratamiento con una baja calidad en sus repeticiones ya que el paciente tiende a no realizar el esfuerzo completo y necesario (Hwang, Seong & Son, 2012).
A partir de un diseño distal y proximal que trabaja el brazo, los efectos con su aplicación sumada a la convencional, obtiene mejores resultados en la función motora de cada una de ellas de forma aislada (Takahashi et al., 2008; Gijbels, 2011) , en los casos de recuperación de la región proximal del MS (Gijbels, 2011) se muestra mejoría gracias a la terapia robótica, la cual influye en codo y hombro (Hwang, Seong & Son, 2012; McGibbon et al., 2017); por otra parte, la región distal de la extremidad superior ha sido objeto de evaluación en ensayos clínicos (Ruiz Garate et al., 2017), demostrando cierta eficacia en la mejoría de la función de la mano, hechos que se mantienen al mes de finalizada la terapia (Orozco, 1999)o incluso a los 2 meses (Warlow et al., 2007).
La actividad física y el ejercicio son fundamentales para varios tratamientos de miembro superior (MS) distal y proximal, para ello es más factible un análisis de las modificaciones posibles de la biomecánica (Guo & Morris, 2017), aumentando el potencial de nuevos diseños en la implementación de nuevos exoesqueletos ampliados para contribuir a la posible mejoría de la biomecánica en los movimientos de esfuerzos en los grados de libertad (DOF) (Nichols-Larsen, 2005). La terapia de movimiento repetitivo ha demostrado reducir el deterioro en pacientes con accidente cerebrovascular crónico (Bütefisch et al., 1995;Hallett & Author, 2002).
Con el fin de tratar de aumentar las ganancias, dando a los pacientes más terapia repetitiva a menor costo, muchos grupos de investigación y las empresas están desarrollando dispositivos robóticos para ayudar en la rehabilitación de pacientes con accidente cerebrovascular crónico (Reinkensmeyer, Emken & Cramer, 2004).
Por lo cual se realiza el análisis de movimiento del miembro superior, enfocado en los movimientos de antebrazo y muñeca, definiendo los puntos y ángulos cono sus grados de libertad a evaluar. Haciendo la utilización de mínimos de JERK utilizando el modelo de curvaturas. Definiendo los tipos de movimientos para los músculos distales y proximales, la función del ejercicio más adecuado para la recuperación, según la señal EMG, definiendo si es una terapia pasiva o activa.
Por medio de un modelamiento cinemático (Waldron & Kinzel, 2004) del movimiento en el tipo de terapia, como del modelo matemático JERK mediante las funciones de MATLAB polyfit y polyval (Wisneski & Johnson, 2007). Para ser más óptimo su análisis y su control como lo han definido en varios trabajos anteriores (Loureiro & Harwin, 2007). Por lo cual se plantea este proceso, la construcción de un exoesqueleto a escala, donde calcule y se puedan reflejar los movimientos del antebrazo, mediante sensores de electromiografía (EMG) que simularán y emularán el mismo movimiento). El diseño de dos sensores de electromiografía (EMG) para la adquisición de la señal de los músculos bíceps y tríceps, la cual costa de un esquema de filtros de señal análoga manteniendo pulsos positivos, una tarjeta Arduino quien es el centro de operaciones ya que se encarga de la recepción y emisión de los pulsos mediante la transmisión de las señales a Matlab, la cual nos da la posibilidad de tener una visualización y control, posteriormente el hardware también se encarga de controlar dos servomotores que se activaran al detectar los movimientos de los músculos.
Es la descripción matemática del movimiento, teniendo en cuenta variables mecánicas y físicas de un sistema de poleas de tercer grado para el miembro superior. La definición de cinemática que tomaremos, es la asociación del movimiento a la ecuación en cada punto del movimiento teniendo diferentes puntos de referencia (Waldron & Kinzel, 2004).
La causa que provoca el movimiento se denomina (dinámica), por la interacción de ellos por lo cual tendremos unidad de fuerzas dadas en kilopondios (kp) que actuaran sobre el miembro superior (MS) y determinando los movimientos resultantes. Las variables estáticas nos darán las condiciones de equilibrio del sistema.
De tal forma que se pueda desafiar el sistema locomotor como estrategia de mejoramiento para el tratamiento en la vida diaria, las capacidades orientadas a los movimientos, identificando los déficits de ciertos movimientos afectados, teniendo en cuenta el rango y el tiempo después de un accidente cerebro vascular (Cirstea & Levin, 2007).
Representamos el brazo y el antebrazo, considerando que el centro de gravedad del antebrazo es equidistante (17 cm) del codo y del objeto de 3 kilopondio. El bíceps se inserta a una distancia de 5 cm del codo, por lo que se debe calcular la fuerza ejercida por el bíceps (T) y la fuerza que se produce en la articulación brazo antebrazo (N) si el sistema está en equilibrio (Viladot Voegel, 2001), lo cual nos permite definir la siguiente ecuación (1) donde, las condiciones de equilibrio de este sistema.
T = N +P +P 1 (1)
Donde T es la fuerza ejercida hacia arriba por parte del bíceps, que puede equivaler a 25,8 kilopondio la fuerza ejercida por la gravedad N, que es la fuerza ejercida en el cartílago articulación del codo, que es equivalente a 21,8 kilopondio (Viladot Voegel, 2001).
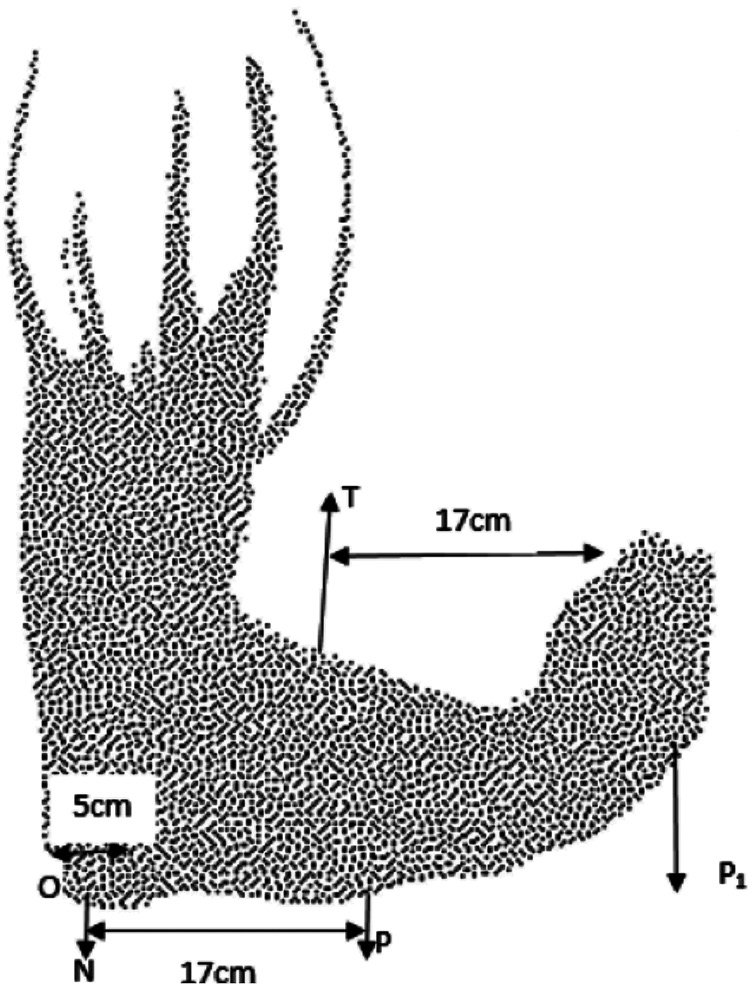
Fig. 1.
representamos el brazo y el antebrazo.
Justo por encima de ambas superficies articulares, se encuentran tres fosas que permiten alojar relieves óseos de los huesos del antebrazo durante los movimientos de flexo extensión.
Por lo cual tomaremos este movimiento, asemejándolo a un sistema de placas de tercer grado, aplicando las leyes de Newton explicadas por (Cromer, 1996) en las cuales se establecen los parámetros de inercia, dando a entender que las fuerzas externas, o sea el peso con el cual se realice la terapia incide proporcionalmente en este factor. De esta forma se establece que la aceleración es proporcional a la fuerza en caída libre ya que esta se ve afectada en la extensión del codo con la activación del tríceps, y, por último cada acción tiene una reacción, por lo cual la fuerza externa en el sistema es la gravedad, la cual se vence constantemente, dándonos también la sensación de peso, ya que es la combinación de la masa por la gravedad.
Esta ecuación se aplica cadenas cinemáticas seriales o abiertas, con el objetivo de calcular los grados de libertad aplicados.


En los datos de la ecuación 1, es el número de enlaces rígidos, j es el número de articulaciones, es la movilidad e iestima la articulación de la muñeca. Por lo cual nos permite calcular el ángulo de los motores y su configuración; la derivada de esta ecuación nos permite calcular los puntos rígidos.

Ecuación 2.
Derivada para calcular puntos rígidos del sistema aplicados al CRAMER
Spencer et al., 2008La ecuación 2, donde es donde es una representación tridimensional de la localización del punto antes de sufrir cualquier rotación, θS es el ángulo es el ángulo es el ángulo y el son las correspondientes matrices parciales de torsión de las rotaciones de las articulaciones del CRAMER (Spencer et al., 2008).
Este modelo propone que la derivada del tiempo y la aceleración para comprobar un tirón. El modelo de mínimos de Jerk es la tercera derivada de la posición, la cual comprobara la teoría, y el esquema de trayectoria más utilizado en entornos de terapia robótica (Patton, Kovic & Mussa-Ivaldi, 2006;Loureiro et al., 2003). La teoría ha sido planteada por Hogan y Flash en 1984 (Flash & Hogan, 1985).
El ADLER (Wisneski & Johnson, 2007) utiliza las ecuaciones de Jerk en el plano cartesiano, para lo que se desarrollaron polinomios de quinto orden, escalados a tiempo y pueden implementarse en el entorno del modelo, el cual utiliza las condiciones límite de la velocidad inicial y final del cero y la aceleración, así como suministra los puntos inicial y final del movimiento en los planos X, Y y Z.
X (t) =X 0 +( X 0 _ X f ) ( 15 T4 _ 6T 6 _ 10 T 3 )
Y( t ) =Y 0 +( Y 0 _Y f ) ( 15 T4 _ 6T 6 _ 10 T 3 )
Z (t) =Z 0 +( Z 0 _ Z f ) ( 15 T4 _ 6T 6 _ 10 T 3 )
Ecuación 3. Puntos de partida en el modelo del movimiento
modelo
En la anterior ecuación X0, Y0 y Z0 , y son los puntos de partida del momento (en t=0), este modelo predice los movimientos alineados rectos entre dos puntos y una curva en forma de campana de la velocidad (Wisneski & Johnson, 2007).
La articulación del codo tiene dos grados de libertad de movimiento: flexo extensión y pronosupinación. La articulación radio cubital proximal (en estrecha relación con la articulación radio cubital distal), permite los movimientos de pronosupinación del antebrazo, comportándose como una articulación de tipo trocoide. Por este motivo podemos describir la articulación del codo con una articulación troco ginglimoide. Debemos señalar, sin embargo, que aunque la articulación humero radial es anatómicamente una articulación esferoide, su asociación con la articulación humero cubital y radio cubital proximal restringe su movimiento a dos ejes (Takahashi et al., 2008).
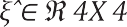
Como se demuestra en la siguiente figura, la descripción de la estimulación muscular del musculo bíceps y tríceps la adquirió mediante una plaqueta de Arduino y su procesamiento mediante Matlab, implementándolo en un exoesqueleto en escala, siendo capaz de replicar el movimiento de este músculo de una persona totalmente sana, con el fin de ser aplicado en un futuro para las personas sobrevivientes de un derrame cerebral.
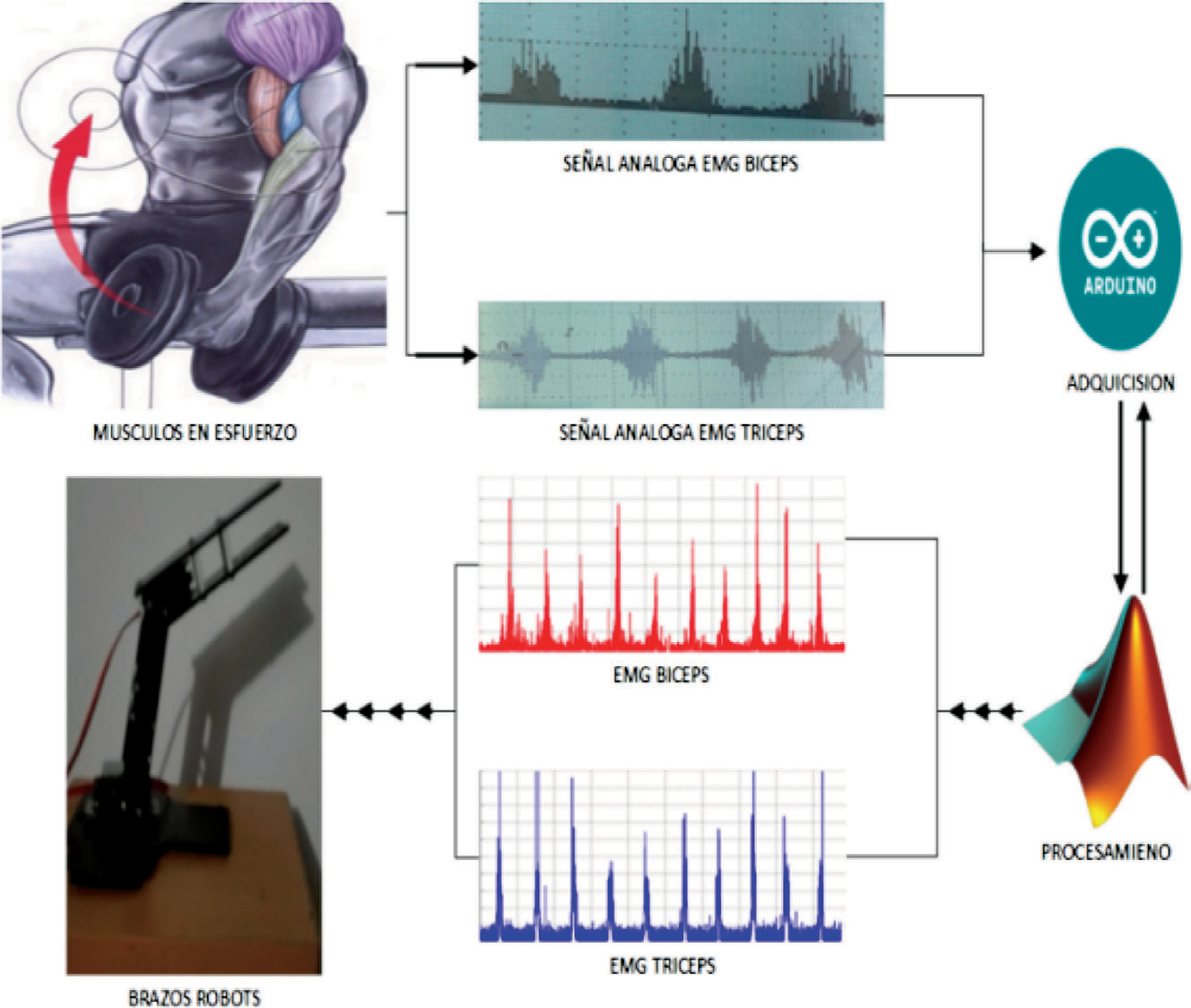
Fig.2.
Diagrama de bloques de la adquisición y posterior movimiento en un exoesqueleto a escala
En la figura 2, se puede observar el comportamiento de los músculos en la interfaz gráfica durante la rutina de ejercicio; cada servomotor también indica los registros de movimientos proporcionados por el músculo en cualquier actividad, aquí se determina el movimiento muscular debido a los comportamientos aplicados en las pruebas, una vez realizados los estudios con cargas asignadas durante un tiempo determinado, se deben cambiar los valores en Kg para continuar con la investigación.
La sensibilidad que implica el trabajo de apoyo en la mejora de la recuperación de hombro-codo robóticamente, es homogéneo a la recuperación motora; en los diferentes estudios realizados de brazo distal y proximal no se ha encontrado evidencia de la mejora significativa a favor del uso de estos dispositivos en la rehabilitación de este miembro (Kwakkel, Kollen & Krebs, 2008). Basado en los estudios de universidades de los países bajos en las diferentes facultades de medicina, neurología, rehabilitación y el departamento de ingeniería mecánica del (MIT), se demostró una mejora significativa en la función motora de la extremidad superior. Para poder hacer un diferencial y distinguir mejor los efectos de la terapia asistida se deberá realizar un análisis cinemático de la terapia genuina de miembro superior (Prange et al., 2006).
Los sensores utilizados para terapias de rehabilitación, son de fuerza y desplazamiento, por los cuales se controlan los movimientos del brazo y la mano (Loureiro & Harwin, 2007). Respecto a los diseños de exoesqueletos neumáticos se utilizan sensores de presión como el ASCX100AN instalado en el cilindro (Klein et al., 2008). En algunos sistemas los sensores de posición se componen de potenciómetros, codificadores del eje y caballos de fuerza, colocados en cada extremo del tren de potencia, controlando los movimientos de la articulación mediante lo posición del motor (Rosen & Perry, 2007). Por lo cual no se han utilizado las señales de electromiografía para realizar un modelo dinámico de las extremidades humanas al no utilizar variables biológicas (Gunasekara et al., 2012).
Algunos ejemplos son: el laboratorio Ampere UMR, desarrolló el diseño de un exoesqueleto de miembro superior con cuatro grados de libertad para rehabilitación; teniendo en cuenta sensores de fuerza se implementaron cuatro, dos a cada lado del sistema: el sistema de control permite el movimiento según la rutina de reentrenamiento, su cinemática directa e inversa fue modelada mediante MATLAB y su interfaz SIMULINK (Garrido, Yu & Soria, 2014).
ABLE (Jarrassé et al., 2010) es un exoesqueleto de cuatro grados de libertad, que en su diseño utiliza sensores de fuerza colocados en un mecanismo de cadena fijada, realizando así su sistema de control, experimentalmente se obtuvieron diferentes rendimientos en la duración del movimiento y la simetría de la velocidad, por lo cual es conectado a un sistema de retroalimentación mejorando la eficacia de este. Cuando el paciente realiza el movimiento, la perturbación se retira, por lo cual la dinámica es proporcional al movimiento de asistencia dando una efectividad al usuario (Jarrassé et al., 2010).
EXO-UL7 (Miller & Rosen, 2010), el cual utiliza cuatro sensores para evaluar fuerza versus torque para accionar un PID para el control de este, el cual tiene un ahorro energético del 11% en términos de potencia, energía y tiempo. Una buena selección de actuadores y sensores (inerciales orientados al cambio de velocidad, orientación y ubicación) en microelectrónica minimizan los costos energéticos de un exoesqueleto (Miller & Rosen, 2010).
Debido a esto se realizó la construcción de dos sensores de EMG para garantizar el funcionamiento óptimo de la construcción a escala y disminuir costos; este sensor análogo consta de filtros y amplificadores de señal. figura 3.
Fig.3.
Diseño de sensor mioeléctrico para exoesqueleto de miembro superior
Acelerómetros
Para el análisis cinemático se debe tener en cuenta la posición, velocidad y aceleración (Waldron & Kinzel, 2004), ya que en conjunto con la neurofisiología, determinan la calidad del movimiento y comprenden los rendimientos del sistema de movimientos subyacentes al sistema locomotor (Gijbels, 2011).
Las señales son medidas mediante un electro goniómetro, que permite medir la flexibilidad de la articulación y la aceleración por piezoeléctricos (Tipo 708, TEAC Corp.) (Bütefisch et al., 1995). Las cuales actúan tan pronto se realiza un movimiento que se normaliza mediante la actuación de los sensores, controlando los torques para evitar transformaciones del ejercicio programado (Riener, Nef & Colombo, 2005).
Existe un prototipo que combina una consola de videojuegos conocida como Nintendo Wii mediante su control wimote con 3 acelerómetros en diferentes ejes. A este se le dio el nombre de CRAMER (Spencer et al., 2008), la cual utiliza una programación basada en visual Basic. Para obtener la aceleración deseada para tener tiempos discretos se parametrizó utilizando una rutina fmicon de MATLAB. Basado en esta programación se realiza un exoesqueleto para iniciar un reentrenamiento basada en video juegos como golf y boliche, pero al realizar la terapia se encontraron con un inconveniente debido a que algunos de los pacientes no mueven muy rápido sus dedos, por lo cual tiene un desfase en la programación, por lo que proponen la construcción de un control simulado, eliminando estos problemas de hardware y de software ya que esto no les da una compatibilidad cercana a la necesaria para obtener mejores resultados (Spencer et al., 2008).
El SPIDAR-G (Riener, Nef & Colombo, 2005), desarrollado en la MIMIC Technologies Inc. por el KIM en el año 2003, en este diseño ideal de retro alimentación de fuerzas basadas en las tensiones del sistema para caracterizar 7 grados de libertad (DOF), identificados en tres de traslación, tres de rotación y uno de alcance. Nombrándolo por dispositivo de interfaz de ritmo para realidad artificial con agarre (SPIDAR-G), por lo cual le permitía interactuar con objetos virtuales. El diseño parte de un sistema de poleas que realizan la función de dar la sanción de presión mediante unos motores dando a simular los sensores hápticos de la piel.
El prototipo ADLER (Wisneski & Johnson, 2007), desarrollado por Wisneski y Johnson en la universidad de Marquette en el año 2007, se basa principalmente en la recuperación de pacientes que han sufrido lesiones cerebrovasculares, considerando las acciones repetitivas beneficiosas para la reasignación neuronal y refuerzo de plasticidad motora. Con base en estudios realizados por ellos, realizan sus funciones orientadas hacia tareas hogareñas. Por lo cual proponen el robot de actividades de la vida diaria (ADLER), combinado con actividades de auto ayuda con el sistema, por lo cual tiene seis grados de libertad, sujeto mediante un cardan a una órtesis al antebrazo y muñeca, también contiene un sistema de agarre con electro estimulación eléctrica (TENS), las trayectorias están programadas para soportar el centro de la muñeca del paciente, ya que se empleará para las actividades comunes como beber y comer. Mediante la examinación del modelo matemático de mínimos de JERK, para determinar el algoritmo de las trayectorias según las curvaturas naturales del movimiento, el desarrollo de este requiere emular el sistema nervioso central (SNC), por lo cual este recibe información visual y espacial sobre cada tarea, para así realizar el movimiento basado en estas tareas. El sujeto de estudio describe el movimiento como más natural pero los autores refieren que a este prototipo le hace falta aún más trabajo en comparación de otros diseños (Wisneski & Johnson, 2007).
El prototipo CRAMER (Spencer et al., 2008), desarrollado por Spencer en University of California en el año 2008, diseñado con el fin de mejorar la terapia para pacientes con accidente cerebrovascular crónico y disminuir los costos. Según la revisión bibliográfica del autor, decide diseñar un dispositivo para los movimientos de flexión, extensión, desviación radial y cubital de la muñeca, supinación y pronación del antebrazo con 3 grados de libertad (DOF). Para calcular los grados de libertad utilizó la ecuación de KutzbachGrüebler. La utilización de juegos de Wii como medio de recuperación no fue el más óptimo ya que hay problemas de compatibilidad y los pacientes no cuentan con la suficiente agilidad en los dedos para realizar estos movimientos en el caso del golf y la bolichera (Spencer et al., 2008).
Los prototipos HAND-CARE (Dovat et al., 2008a) y HAND-CARE 2 (Dovat et al., 2008b) desarrollados por Dovat en la National University of Singapur en el año 2008 -2009, son un sistema de rehabilitación de dedos, dándole la posibilidad al paciente de recuperar una gran cantidad de movimientos de los cinco dedos después de una lesión cerebrovascular.
El diseño Universal Haptic Drive (Oblak, Cikajlo & Matjacic, 2009), fue planteado como un dispositivo de rehabilitación de cualquier parte del brazo, con tan solo 2 grados de libertad; el modo de entrenamiento depende de la configuración mecánica, la fuerza proporcionada es conforme a la impedancia controlada teniendo en cuenta el factor de elasticidad dado por una articulación pasiva por Oblak en el University Rehabilitation Institute, Ljubljana, Slovenia.
ROBIN (Loureiro & Smith, 2011) (Rehabilitación de lesiones cerebrales), fue desarrollado por Loureiro en la School of Engineering and Information Sciences en conjunto con la Middlesex University en el año 2011, para el reentrenamiento de brazo después de una lesión o derrame cerebral. Para esto tiene doce grados de libertad activos y nueve grados de libertad pasivos dándole los enfoques de readaptación asistida, asistida activa o pasiva o en combinación del alcance y compensación gravitacional en secuencias de alcancecaptura-transferencia-liberación en posición de sentado o de pie.
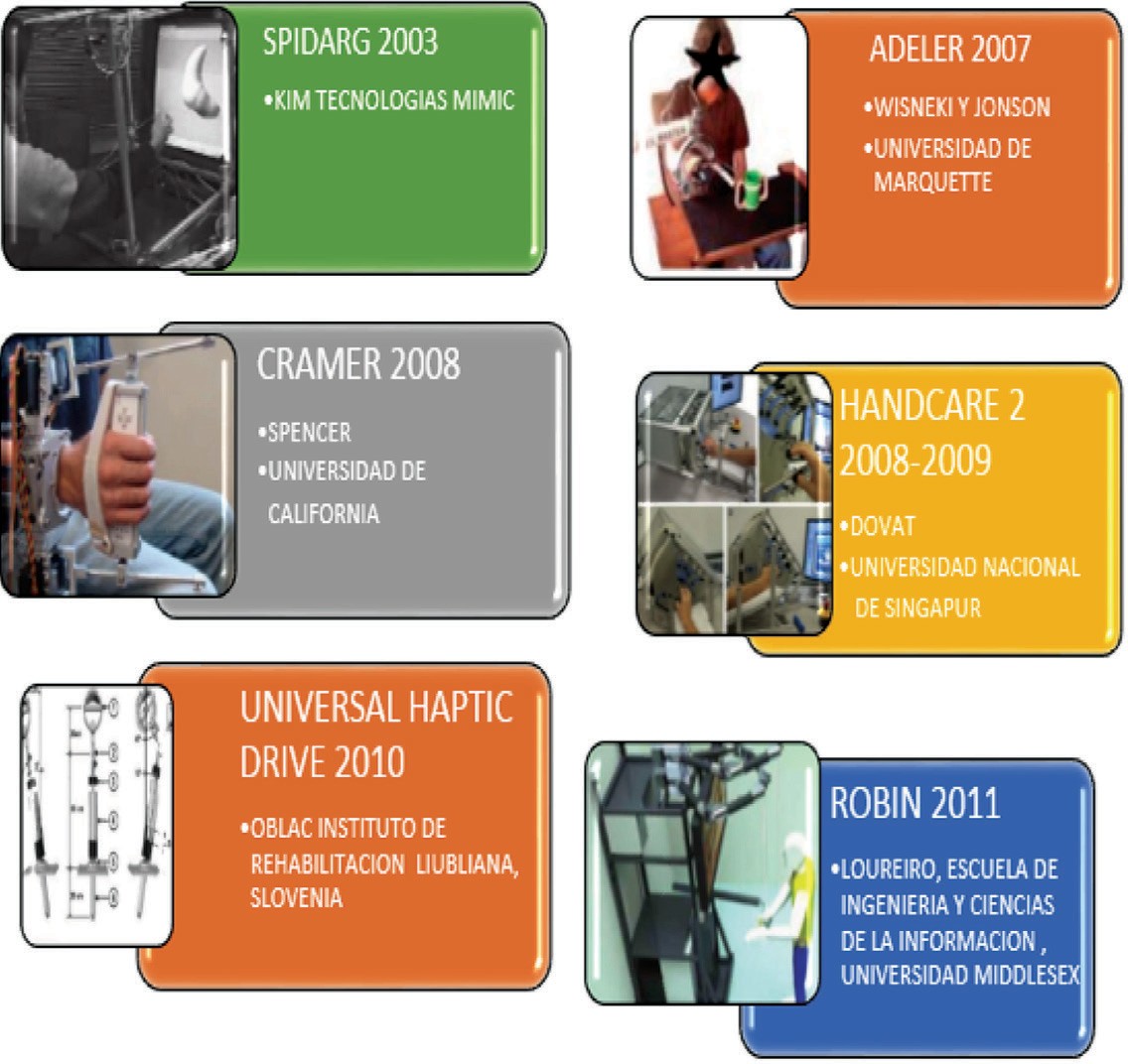
Fig.4.
Prototipos de efecto final organizados por fecha de publicación
El diseño a escala de nuestro exoesqueleto se basa en estos modelos, teniendo en cuenta que no ha sido construido para pruebas en seres humanos, para esto se deben cambiar las características del material a usar y aumentar la potencia de los motores, así como mejorar la base a anclar, por lo cual se realiza un modelo a escala para tener en cuenta en construcciones futuras de estos diseños como lo muestra la Figura 4.
Para la construcción de nuestro prototipo a escala real, será necesario implementar dos sistemas adicionales que delimiten los grados de libertad del movimiento (DOF), y que se pueda distinguir perfectamente la evolución del tejido muscular, comparando las dos señales electromiográficas, por lo cual el software se volverá un poco más robusto en estos dos aspectos a tener en cuenta.
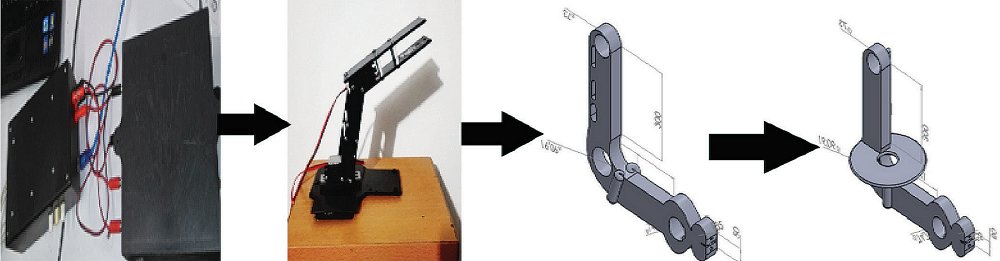
Fig. 5.
Faces del diseño de prototipo a escala real
Para realizar un diseño óptimo se deben cumplir varias fases para llegar a tener un nivel adecuado para ser aceptado por el mercado y por los pacientes, por lo que el diseño debe ser evaluado con condiciones mecánicas de los materiales, con los cuales se debe hacer una evaluación de costo beneficio con una diversidad de ellos, haciendo pruebas teóricas mediante análisis de elementos finitos (FEM) y pruebas físicas adicionales.
Prototipos experimentales de exoesqueleto
A continuación, se presentan diversos prototipos de exoesqueleto que son experimentales:
En el año 2006 (Mali & Munih, 2006) se desarrolla el prototipo HIFE, que consiste en un dispositivo háptico con dos grados activos de libertad en un sistema impulsado por tendones. Fue construido como un mecanismo pequeño para el dedo, generando una fuerza de 10 N, adecuado para el ejercicio con los dedos, como los modelos cinemáticos y dinámicos del dispositivo del diseño de control, la implementación de la aplicación en una PC, el entorno de control de clase de milisegundos en tiempo real, y los mecanismos de seguridad al paciente. Además, se realizó la prueba de duración para la fuerza de salida sostenida máxima y las validaciones de precisión de la fuerza de salida y la consistencia de la ruta seguida, lo que hace que el dispositivo sea adecuado para fines terapéuticos desarrollados por Mali y Munih en la Universidad de Ljubljana (Univerza v Ljubljani).
El carden-7 (Rosen & Perry, 2007) ofrece la recuperación de 7 movimientos de la vida diaria del miembro superior, teniendo en cuenta la interfaz hombre–máquina, produciendo una nueva generación tecnológica hacia este campo de la rehabilitación médica, concretamente hacia las articulaciones glenohumeral, codo y muñeca. Sus aplicaciones según el autor son: dispositivo terapéutico y de diagnóstico para fisioterapia, dispositivo de asistencia de órtesis para amplificaciones de potencia humana, dispositivo háptico en simulación de realidad virtual y dispositivo maestro para la tele operación diseñado por Perry en el año 2007 en la University of Washington.
Medarm (Ball, Brown & Scott, 2007) es un prototipo de exoesqueleto para rehabilitación compleja del hombro, dándole un sistema complejo de seis grados de libertad (DOF), enfocándose principalmente en las articulaciones esternoclavicular, glenohumeral y codo. Por lo cual tiene un movimiento más natural, evitando singularidades y maximizando la capacidad de manipulación, minimizando la inercia del sistema, dándole cualquier nivel de asistencia en el movimiento y compensación gravitacional para utilización en pacientes con accidentes cerebrovasculares, desarrollado en la Queen’s University, Kingston, por Ball en el año 2007.
El DAMPACE (Stienen et al., 2007) fue diseñado como un sistema pasivo para controlar la rotación del hombro y el codo, dando su funcionalidad a las actividades diarias como entrenamiento de coordinación y fuerza; puede ayudar al diagnóstico de trastornos del movimiento, en pacientes con accidente cerebrovascular para ayudar en su tratamiento. El diseño nos permite no alinear el dispositivo con el hombro y las hachas de codo superan algunas de las dificultades tradicionalmente asociadas con los exoesqueletos. La reducción de los tiempos de preparación a unos pocos minutos y la ausencia de fuerzas de reacción estáticas en las articulaciones humanas, son ventajas importantes y han sido bien recibidas por terapeutas y médicos, ha sido diseñado por Stienen en la Universiteit Twente en el año 2007.
Se presenta el diseño de un robot exoesquelético portátil, para la rehabilitación de los traumatismos de las extremidades superiores, asistido con evaluación clínica (RUPERT) (Sugar et al., 2007), que realiza unos movimientos repetitivos, los cuales han demostrado que la rehabilitación física intensa y repetitiva es beneficiosa para superar los déficits de las extremidades superiores. Según el autor, tiene cuatro grados de libertad accionados por músculos neumáticos (PM) resistentes y seguros en el hombro, el codo y la muñeca; están programados para activar el dispositivo para extender el brazo y moverlo en el espacio 3-D. Los sensores retroalimentan la posición y dan información para la evaluación cuantitativa del rendimiento de la tarea. Desarrollado en el año 2007 por Sugar en The University of Arizona.
El exoesqueleto para rehabilitación de deterioro neurológico (IntelliArm) (Park, Ren & Zhang, 2008), se basa en siete grados de libertad pasivos y dos activos, permitiendo un diseño ergonómico correcto al miembro superior para medir torsiones y fuerzas en 18 ejes y 9 posiciones, realizando un diagnóstico preciso y cuantitativo, estiramiento articular control inteligente para ajustar la velocidad de estiramiento constantemente de acuerdo con las condiciones de la articulación, movimiento voluntario para realizar tareas funcionales y evaluaciones de resultados del tratamiento. Este prototipo fue desarrollado en el año 2008 por Park en Northwestern University.
ABLE (Garrec, 2008) es un prototipo de exosqueleto desarrollado por CEA-LIST Interactive Robotics diseñado por Garrec en el año 2008, es el primer modelo de 4 ejes, pero ya han comenzado el diseño con 7 ejes y versiones portátiles, manteniendo la baja inercia y la alta eficiencia, con una capacidad de 40N de esfuerzo continuo en la mano con su aplicabilidad al proyecto BRAHMAN para la rehabilitación de miembro superior. Esta prototipo se adaptará a las funciones típicas, por lo cual debe cumplir con funciones de teleobjetivos intuitivos, dispositivos hápticos para realidad virtual y entrenamiento deportivo. Los diferentes usuarios han comentado que debe mejorar su diseño para proporcionar ajustes de longitud del brazo y minimizar su gran tamaño.
La University of California, desarrolla (BONES) (Klein et al., 2008) en el año 2008, diseñado por Klein. BONES consta de cuatro grados de libertad, diseñado neumáticamente para la rehabilitación de hombro, control de flexión y extensión de codo. El diseño no demuestra mucha inercia y genera fuerza de acción directo en la articulación del hombro, tiene la capacidad de generar movimientos de rotación interna y externa del brazo, sin ningún elemento circular basado en la biomecánica del antebrazo. Realizando movimientos más naturalistas para ser aplicado en rehabilitación de pacientes con lesiones cerebrovasculares.
El MGA (Carignan, Tang & Roderick, 2009) tiene 6 grados de libertad diseñado para la rehabilitación de hombro, se desarrolla adicional una interfaz háptica en función de entornos virtuales, para realizar entornos de telemetría durante cierta tarea, realizando los efectos de resistencia e inercias suficientes para mejorar la terapia mediante este medio; desarrollado por la armada de Estados Unidos y diseñada por Carignan en el año 2009.
EXOROB (Rahman, Saad, Kenné & Archambault, 2009 ), está diseñado y enfocado principalmente en rehabilitar el miembro superior, ya que es vital en las funciones diarias, el cual utiliza seis grados de libertad, emulando los movimientos naturales, a partir de un modelo cinemático y modificaciones según la metodología Denavit-Hartenberg para lograr una simulación computarizada no lineal, para de esta manera ser más efectivos con el tratamiento propuesto, diseñado por Rahman en el año 2009 en la Electrical Engineering Department, École of Technologie Superieure.
El diseño del SUEFUL-7 (Gopura, Kiguchi & Yi, 2009) está basado en un control de electromiografía (EMG) y siete grados de libertad. Realiza los movimientos de flexión y extensión vertical y horizontal del hombro, rotación interna y externa del hombro, la flexión y extensión del codo, la supinación y pronación del antebrazo, la flexión y extensión de la muñeca y en la muñeca desviación radial y cubitales de individuos físicamente débiles. Considerando el vector de la fuerza del efecto final, los parámetros de impedancia se ajustan en tiempo real al considerar la postura de la extremidad superior y los niveles de actividad de EMG.
El REHABEXOS (Vertechy, 2009) diseñado por Vertechy en PERCRO, laboratorio de la Scuola Superiore Sant’Anna en el año 2009, este prototipo se basa en el L-EXOS, pero este genera fuerzas de contacto controladas en toda la extremidad no solo en la muñeca. Mejorando sustancialmente su diseño hacia la seguridad del paciente, así como la efectividad de este. Enfocado en la rehabilitación en el miembro superior (MS) después de una lesión cerebral o de médula espinal, como de accidentes cerebrovasculares, este diseño consta de cinco grados de libertad, permitiendo la flexo-extensión de codo, supinación y pronación del antebrazo, los movimientos de la muñeca. Mejorando el (MAHI EXO I) (Fitle, Pehlivan & O’Malley, 2015), agregado para permitir la abducción del hombro, lo que mejora la alineación, y el hardware ahora permite el intercambio simplificado y rápido del lado del tratamiento, arreglando el contragolpe y la singularidad de los datos, por lo cual MAHI EXO II (Fitle, Pehlivan & O’Malley, 2015) mejoró estos detalles, mejorando el control de las funciones terapéuticas y el diagnóstico. Este prototipo fue diseñado en el año 2011 por Pehlivan en Rice University.

Fig. 6.
Prototipos de exoesqueletos organizados cronológicamente
El diseño de un exoesqueleto, debe cumplir con la biomecánica, así como la ergonomía necesaria, sin olvidar los cálculos necesarios para mantener grados de libertad en nuevos sistemas planteados, teniendo en cuenta la formulación de Kutzbach-Gruebler y mínimos de Jerk, modificando el sistema de sensores de fuerza, desplazamiento y presión.
La construcción de un sistema de sensores debe tener en cuenta variables fisiológicas unidas a las utilizadas actualmente, de forma que estos exoesqueletos puedan utilizar redes neuronales en un futuro, para realizar procesos de rehabilitación en personas con daños neuronales a partir de la biomecánica, construyendo puentes de comunicación.
En la construcción de un exoesqueleto de miembro superior se debe tener en cuenta que, adapte una sensórica tradicional con señales fisiológicas de los músculos afectados, realizando un control más efectivo y dinámico alimentando la cinemática actual del cuerpo.
Fig. 1.
representamos el brazo y el antebrazo.
En los datos de la ecuación 1, es el número de enlaces rígidos, j es el número de articulaciones, es la movilidad e iestima la articulación de la muñeca. Por lo cual nos permite calcular el ángulo de los motores y su configuración; la derivada de esta ecuación nos permite calcular los puntos rígidos.
Ecuación 2.
Derivada para calcular puntos rígidos del sistema aplicados al CRAMER
Spencer et al., 2008Fig.2.
Diagrama de bloques de la adquisición y posterior movimiento en un exoesqueleto a escala
Fig.3.
Diseño de sensor mioeléctrico para exoesqueleto de miembro superior
Fig.4.
Prototipos de efecto final organizados por fecha de publicación
Fig. 5.
Faces del diseño de prototipo a escala real
Fig. 6.
Prototipos de exoesqueletos organizados cronológicamente


